MS300/MH300 PROFINET Communication Card CMM-PN02
CMM-PN02 Operation Manual
5.3 Motor Drive Handling when Disconnection
If the Profinet card is disconnected after the motor drive is connected to the Profinet card, it will
trigger Eccb. After the card has established real-time channel with the host computer, if it is found
that it can no longer transmit real-time data normally, the motor drive will be notified and Ecto will
be triggered by the motor drive. When the two fault codes above are triggered, the motor drive
will stop according to its firmware version, in accordance with related parameters.
This communication card accomplishes non-real-time data transfer through Profinet's Record
Data Object. During the transmission, the host computer sends a Write/Read request through the
service and operation fields. The request should access the Record Data Object 0x4D2 defined
by CMM-PN02, and specify the read/write action of the parameters of the motor drive through
the different contents of the Data Block. After the request is sent, if there is no problem with the
packet and the CMM-PN02 is not busy, the card will reply with a Write/Read Response to let the
host computer know the packet has been received.
Service Request or Response service.
Request (0x00)
Response (0x80)
UI8
Operation Read or Write operation.
UI8
ARUUID
Identifier
- time low
- time mid
- time high and version – clock – node
-
UI16
UI16
Qctet[2]
API Application Process Identifier
Device Access Point (0x000)
UI32
Slot of the Module Access Point (MAP/PAP)
Sub-slot of the Module Access Point (MAP/PAP)
Index Index of the Record Data Object
U16
Additional value 1
(response only)
Field for transferring additional data - UI16
Additional value 2
(response only)
Field for transferring additional data - UI16
24 bytes for request; 20 bytes for response.
Used only with request and read response.
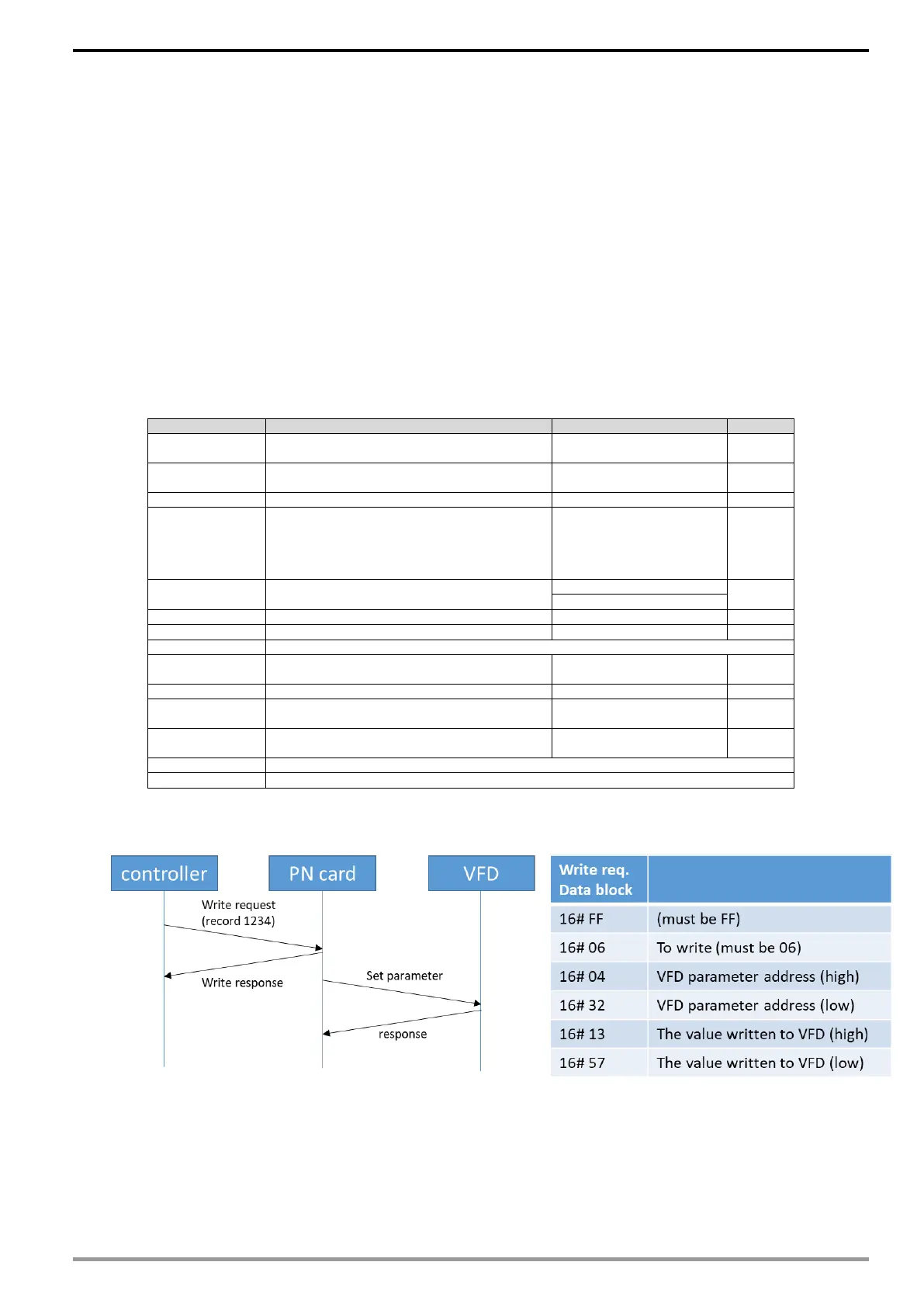
When the host computer writes parameters, the content and flow of the data block should be as
shown below:
When the host computer needs to read the parameters, the data block content and the flow
are as follows. It needs to use write request to notify CMM-PN02 to read the parameters of
the motor drive, and then use read request to read the parameters. Note that after telling the
motor drive to read the data, CMM-PN02 needs some time (more than 5ms) to receive the
data from the motor drive, and if there is read/write during this time, the data will be incorrect.