14 How to…
How to improve load compensation for low speeds
Load compensation automatically compensates for changes in motor speed when the chair
drives over loads such as sidewalks, curbs or slopes. If the chair performs poorly on carpet or at
low speeds, the most probable cause is a Load Compensation value that is set too low.
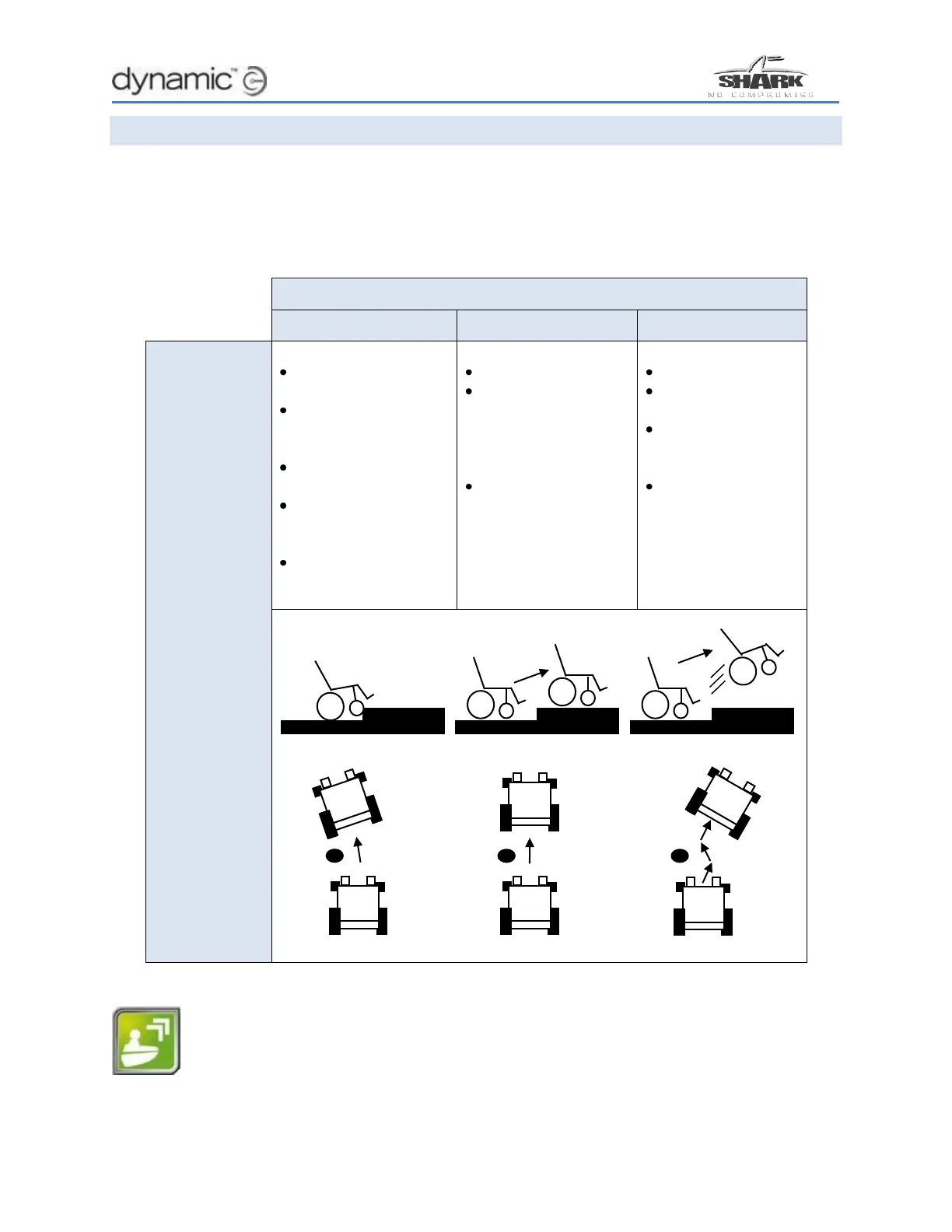
The table below shows the behaviour and effects on a powerchair system for different values of
Load Compensation.
Drives like it is going
through thick mud
Slows down when it
goes up a sidewalk
edge or up a ramp
Slows down with
heavier users
Changes direction
when it drives over
a bump
Changes direction
when the weight of
the user shifts.
Drives smoothly
Keeps the speed
reasonably
constant. Only
slightly slows down
on a slope.
Keeps the
direction constant.
Only slightly
changes direction
when it drives over
a bump.
Drives very rough
Hard to steer or
control, vibrates
Swerves when it
drives over a
bump.
Motor becomes
hotter than
normal very
easily,
decreased motor
life
To improve load compensation for low speeds, set the value of the Load Compensation
parameter to the correct motor resistance value of the used motor. The Load
Compensation parameter can be found by connecting the SHARK system to a PC or
laptop, and running the Wizard application. Read the program from the connected
controller by pressing the Wizard button shown to the left.