Technical reference
Page 66
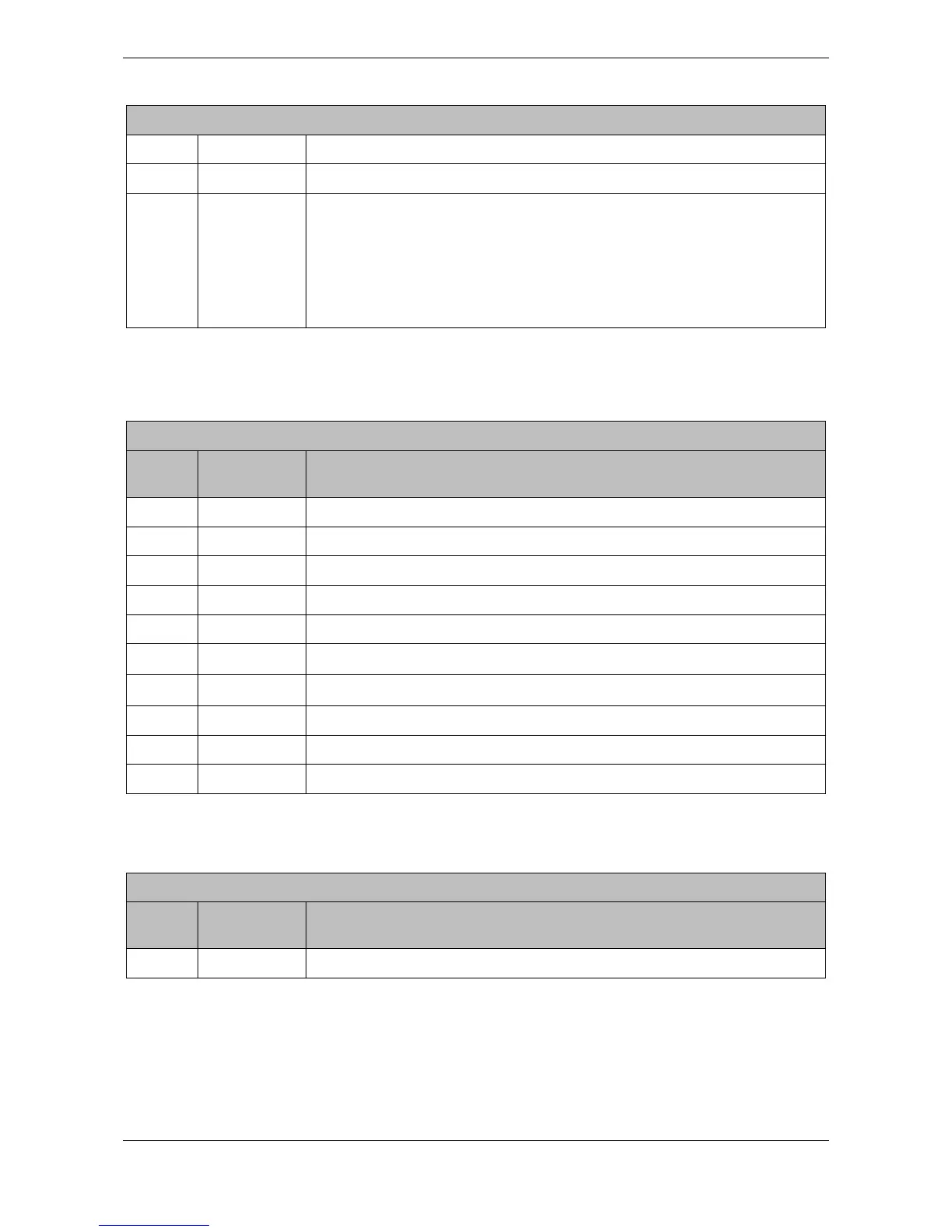
6.8.10 GNS - GNSS fix data
This sentence provides fix data for a single or combined satellite navigation system. The sentence provides
data for GPS, GLONASS and possible future satellite systems and combinations thereof.
6.8.11 HDT - Heading, true
Actual vessel heading in degrees produced by a true heading system or device.
3 hhmmss.ss Time of position (UTC)
4 A Status: A = data valid V = data invalid
5 a Mode indicator:
A = Autonomous
D = Differential
E = Estimated (dead reckoning)
M = Manual input
S = Simulator
N = Data not valid
$-- GNS, hhmmss.ss, llll.ll, a, yyyyy.yy, a, c--c,xx,x.x,x.x,x.x,x.x,x.x *hh<CR><LF>
Field
number
Description
1 hhmmss.ss Time of position (UTC)
2 llll.ll, a Latitude N/S
3 yyyyy.yy, a Longitude E/W
4 c--c Mode indicator
5 xx Number of satellites in use, 00-99 - NOT USED
6 x.x
Horizontal dilution of precision (HDOP) - NOT USED
7 x.x
Antenna altitude, m, above mean-sea-level - NOT USED
8 x.x Geoidal separation, m - NOT USED
9 x.x Age of differential data - NOT USED
10 x.x Differential reference station ID - NOT USED
$--HDT, x.x, T*hh<CR><LF>
Field
number
Description
1 x.x, T Heading, degrees true
$--GLL, llll.ll, a, yyyyy.yy, a, hhmmss.ss, A, a *hh<CR><LF>
 Loading...
Loading...









