Instruction Manual
D103412X012
Detailed Setup—PID Function Block
July 2013
126
PID Function Block
Overview
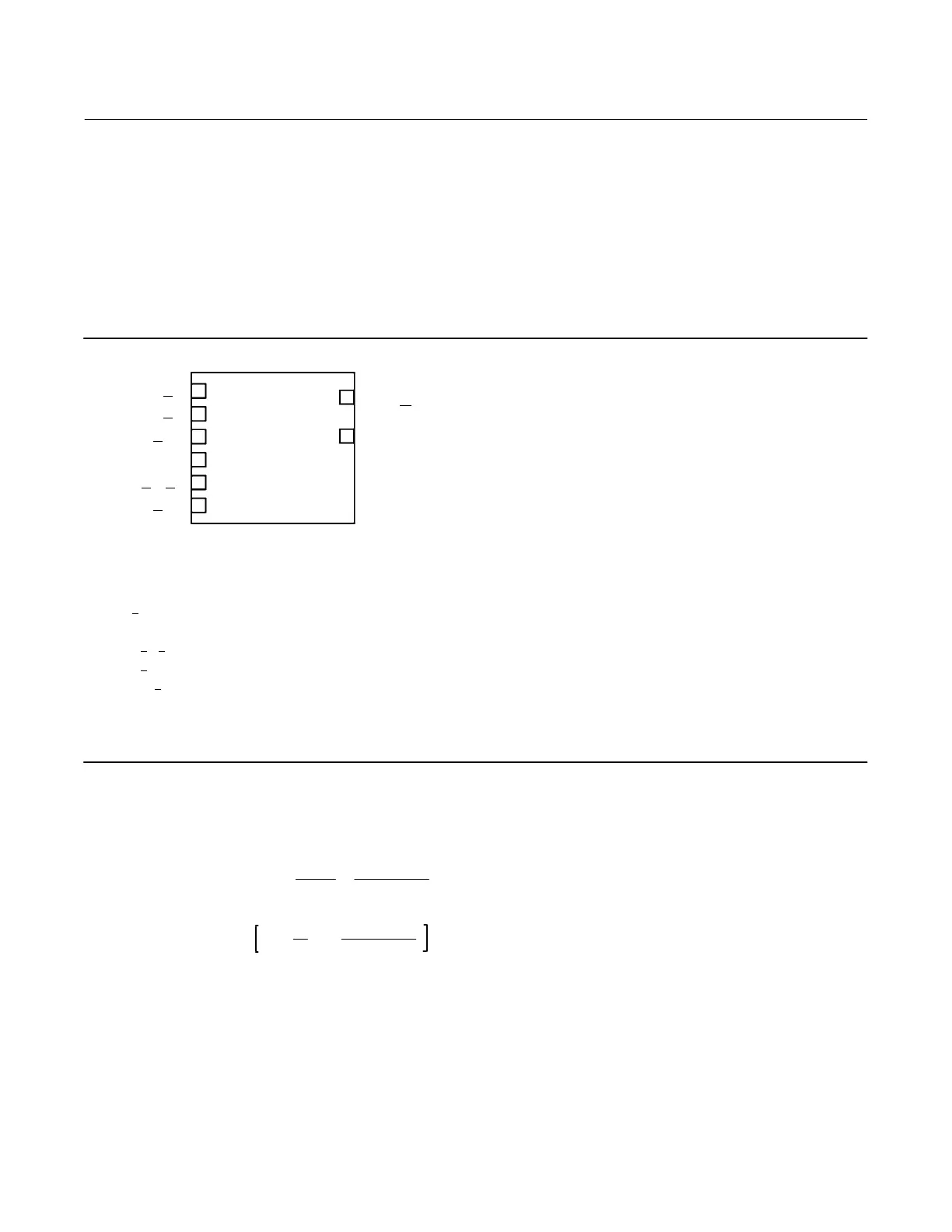
The PID function block (figure 4‐9) combines all of the necessary logic to perform proportional/integral/derivative
(PID) control. The block supports mode control, signal scaling and limiting, feedforward control, override tracking,
alarm limit detection, and signal status propagation.
Figure 4‐9. Proportional+Integral+Derivative (PID) Function Block
B2720
BKCALOUT
OUT
CAS IN
PID
BKCAL IN
FF VAL
IN
TRK
IN D
TRK
VAL
BKCAL_IN = THE ANALOG INPUT VALUE AND STATUS FROM ANOTHER BLOCK'S BKCAL
_OUT OUTPUT THAT IS USED FOR BACKWARD OUTPUT TRACKING FOR BUMPLESS
TRANSFER AND TO PASS LIMIT STATUS.
CAS_IN
= THE REMOTE SETPOINT VALUE FROM ANOTHER FUNCTION BLOCK.
FF_
VAL = THE FEEDFORWARD CONTROL INPUT VALUE AND STATUS.
IN
= THE CONNECTION FOR THE PROCESS VARIABLEFROM ANOTHER FUNCTION BLOCK.
TRK_
IN_D = INITIATES THE EXTERNAL TRACKING FUNCTION.
TRK_
VAL = THE VALUE AFTER SCALING APPLIED TO OUT IN LOCAL OVERRIDE MODE.
BKCAL_
OUT = THE VALUE AND STATUS REQUIRED BY THE BKCAL_IN INPUT OF ANOTHER
FUNCTION BLOCK TO PREVENT RESET WINDUP AND TO PROVIDE BUMPLESS TRANSFER
TO CLOSED LOOP CONTROL.
OUT
= THE BLOCK OUTPUT AND STATUS.
The block supports two forms of the PID equation: Standard and Series. You can choose the appropriate equation
using the MATHFORM [70] parameter. The Standard ISA PID equation is the default selection.
tandard Out + GAIN ex
ǒ
1 )
1
t
r
s ) 1
)
t
d
s
T t
d
s ) 1
Ǔ
Series Out + GAIN ex
ǒ
1 )
1
t
r
s
Ǔ
)
ǒ
t
d
s ) 1
T t
d
s ) 1
Ǔ
)
where
GAIN: proportional gain value
τ
r
: integral action time constant (RESET parameter) in seconds
s: laplace operator
τ
d
: derivative action time constant (RATE parameter)

 Loading...
Loading...








