Chapter 12 Basic Motion
If you have any concerns, please feel free to contact us via support@freenove.com
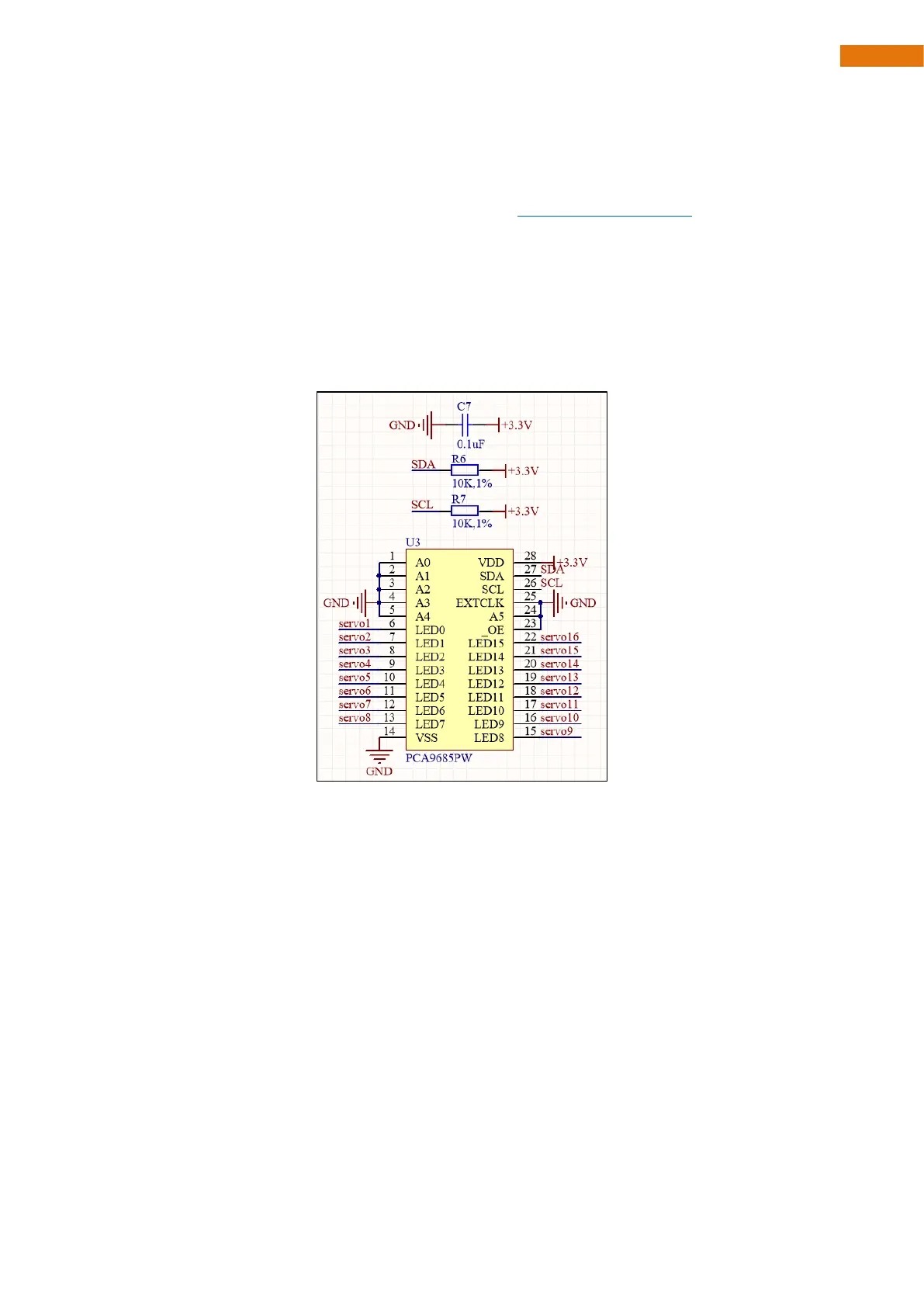
Schematic
As shown in the picture, we connect the SDA and SCL pins of PCA9685 chip to GPIO13 and GPIO14 of ESP32
respectively. In this way, we can communicate with PCA9685 through IIC, and control the servo through
PCA9685 to rotate to any angle.
Sketch
Open “Sketch_07_Action” folder in “Freenove_Robot_Dog_Kit_for_ESP32\Sketches” and then double-click
“Sketch_07_Action.ino”.