Burn the Firmware
For this product, ESP32 has burned the required firmware by default. If your ESP32 does not have the firmware
or the firmware does not work, please re-burn the firmware with the following steps.
We will explain respectively for Windows, Mac OS and Linux systems.
Linux
Check the Installation of CH340
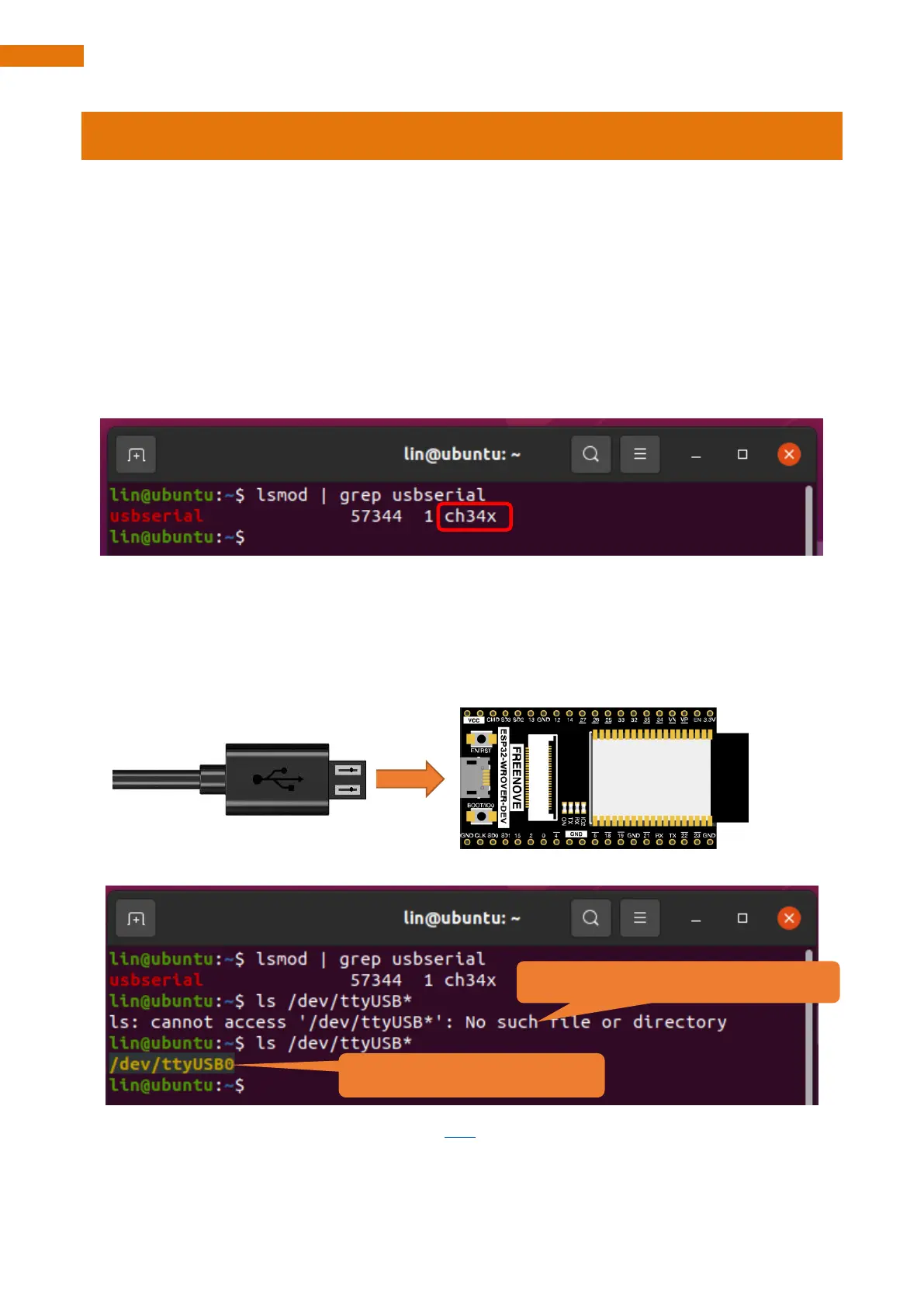
Open the system terminal and type in the command: lsmod | grep usbserial. If your computer has installed
the driver, you should see the following information:
If the driver has been installed, you can determine the port used by ESP32 to communicate with your computer
in this way:
1. When ESP32 is not connected to your computer, open system terminal and type in the command ls
/dev/tty*
2. Connect ESP32 to your computer with a USB cable and type in the command ls /dev/tty* again.
Compare the results. As shown below, /dev/ttyUSB0 is the port that ESP32 communicates with your computer.
If your computer has installed CH340, you can click here to skip to the next step.