Need support? support@freenove.com
Now the installation is finished.
Install Freenove Board
You can download it directly by clicking the link below, and unzip it manually.
https://github.com/Freenove/Freenove_ESP32_Robot_Dog_SDK_for_Arduino_IDE/archive/master.zip
Or download via the command
git clone https://github.com/Freenove/ Freenove_ESP32_Robot_Dog_SDK_for_Arduino_IDE.git
Here we take window installation as an example. Same steps for Linux and Mac.
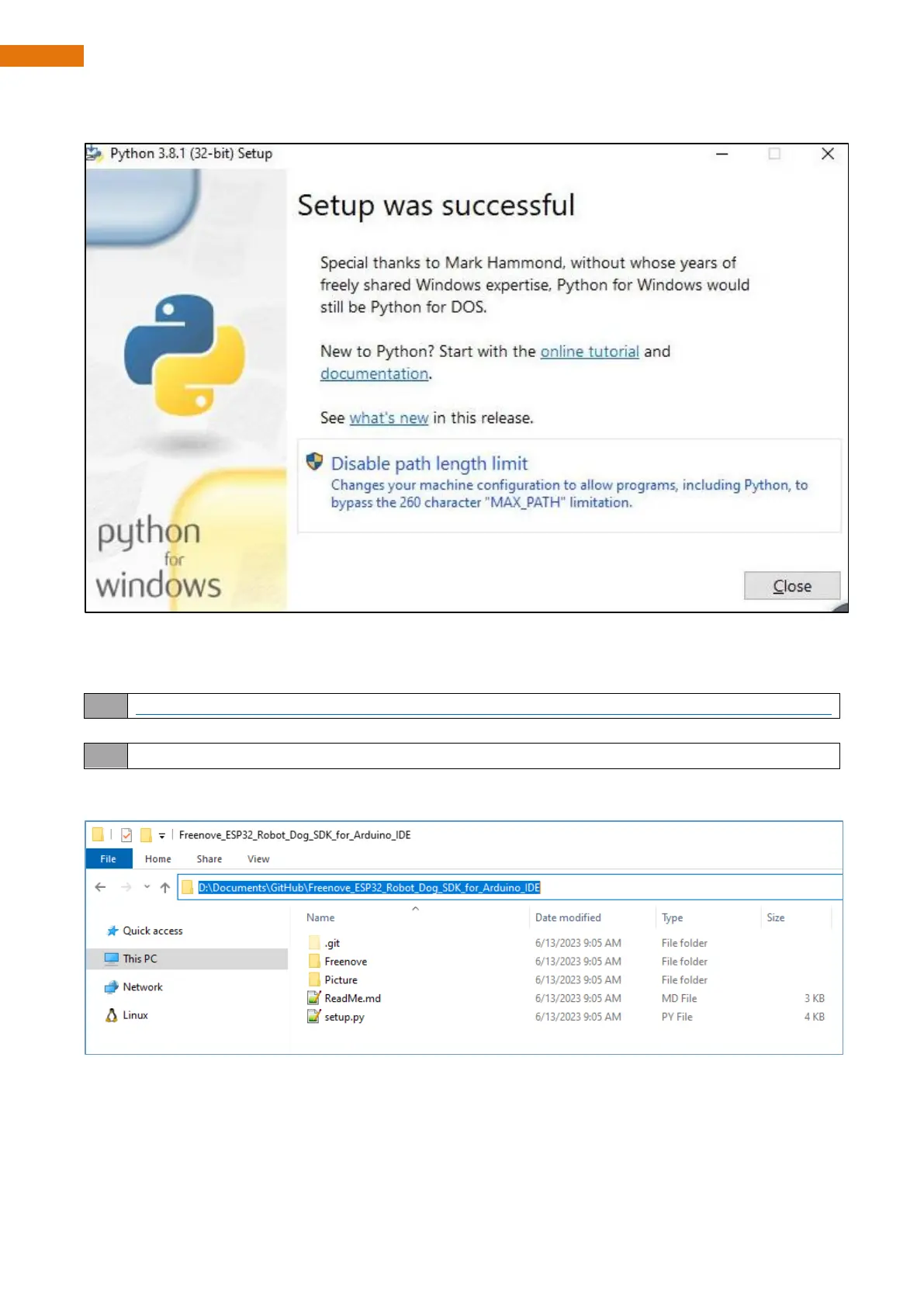
Find the unzipped file directory, as shown in the figure below.
Type cmd in the address bar and press Enter. If you are on a Linux or Mac computer, you can use the terminal
to enter the file directory.