Unit: degree, ranging from 0 to 20 degrees.
ACTION_MOVE_ANY
F#alpha#stepLength#gama#spd#\n
Make the robot move sideways for alpha degrees counterclockwise in its forward direction while rotating
alpha degrees at each step, with the step length of stepLength and the speed of spd.
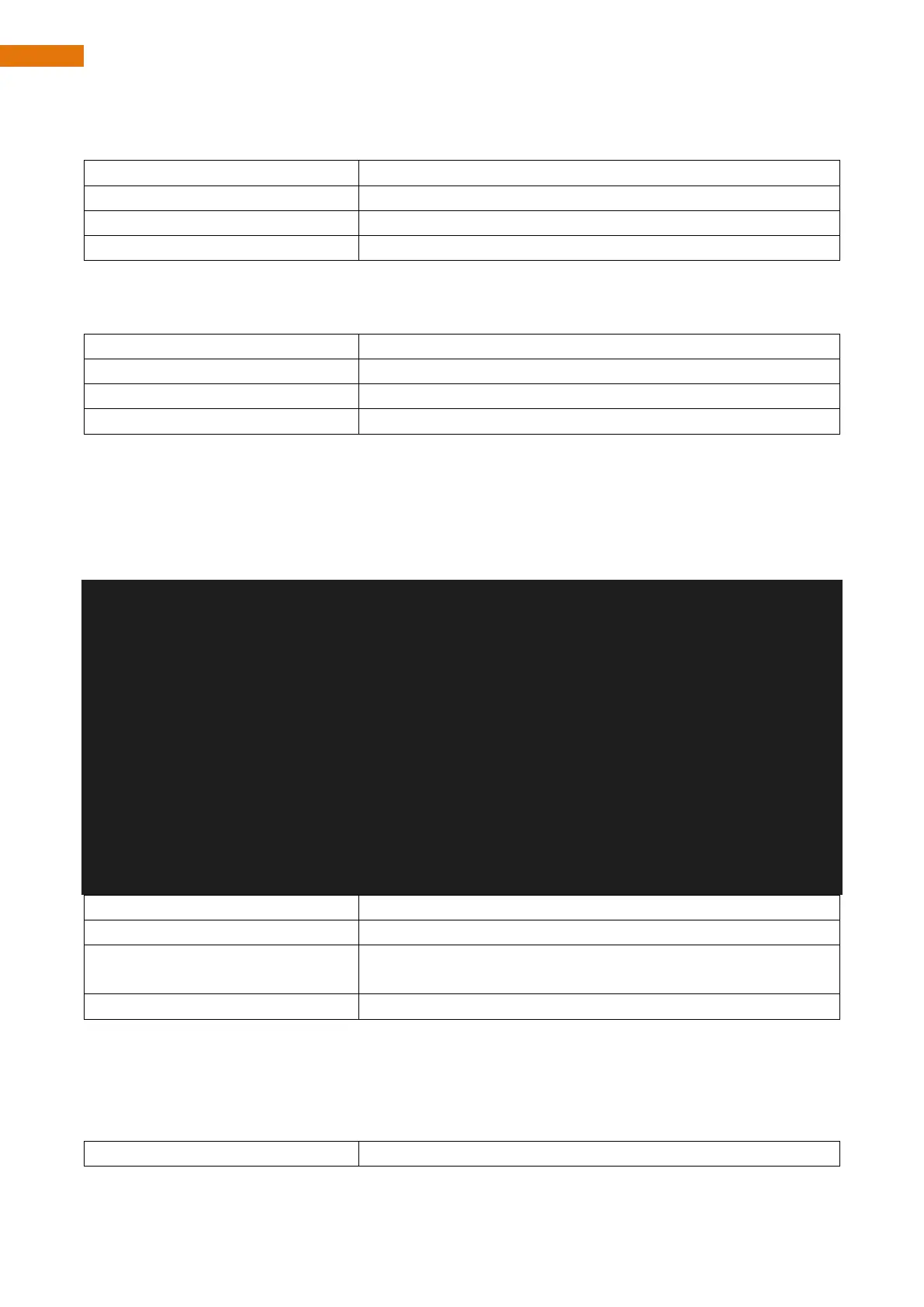
/**
* @brief The command for walking, in any direction, at any step length and any
speed, with any rotation angle.
*
* @param alpha The moving direction, with the x-axis direction as 0 degrees,
counterclockwise as positive and clockwise as negative. Unit: degree [0-360]. The x-
direction means moving forward .
* @param stepLength The length of each step (<=20)
* @param gama The rotation angle. Rotate in place with Rotate in place, with
counterclockwise as positive and clockwise as negative, and the unit is degrees. [0-
360].
* @param spd The moving speed. Unit: mm / 10ms [1, 8]
*/
The robot moves sideways to the left while rotating 10 degrees to
the right at each step, with a step length of 10 and speed of 5.
This command also only needs to be sent once. Once commanded, the robot keeps walking until it receives
a new command, such as a command to stop walking or to twist its body.
ACTION_CAMERA
This is the command sent to the app to determine whether the camera is malfunctioned. The phone app
receives and parses the command.