TECDIS Installation Manual Page 72
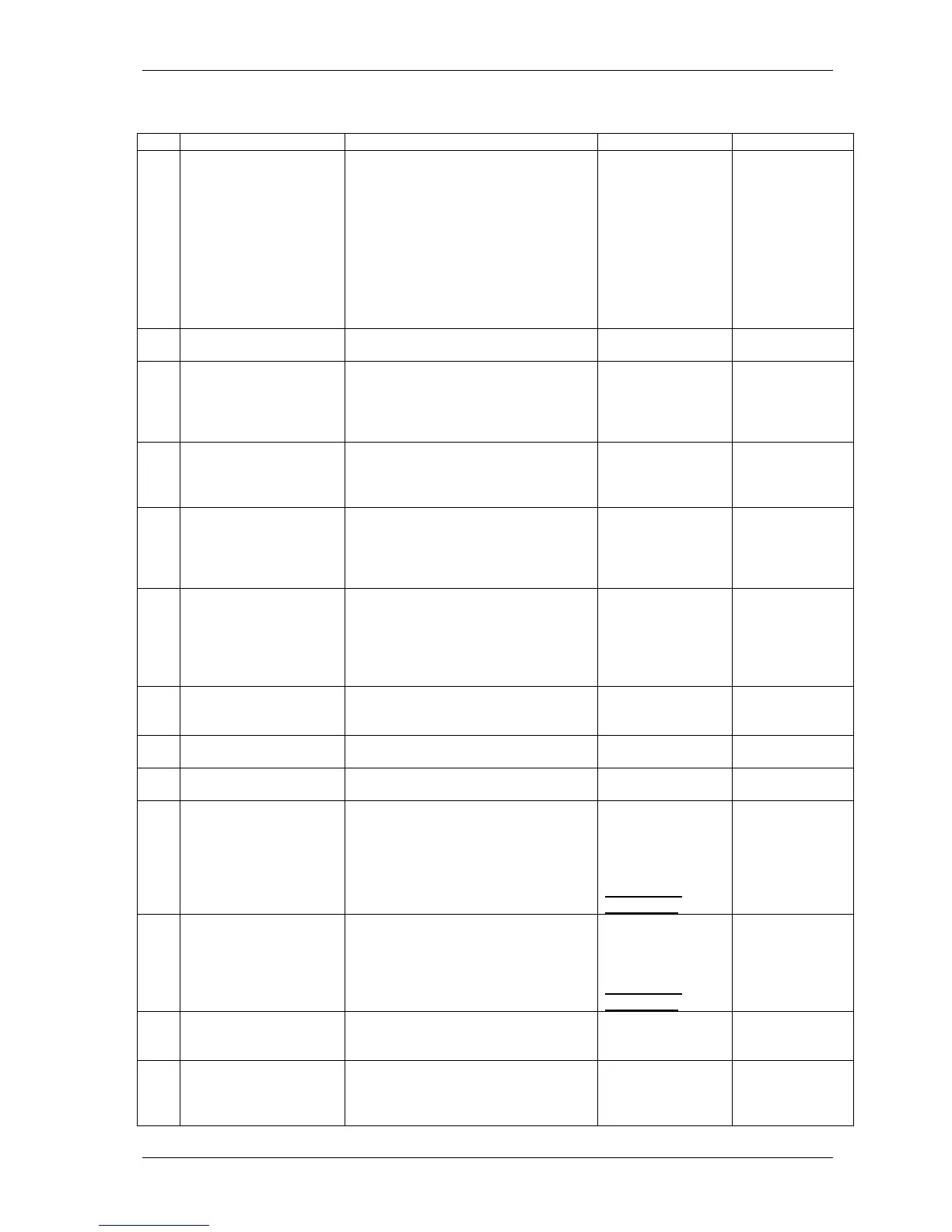
Fail to Safe Properties
Item Fail Track Control (TCS) Test Result
1
Position senso
antennas
to be blinded off.
When either of position sensor
acquisition stops, TCS emits alarm but
continues to function utilizing acquired
position from other position sensor,
LOG, and GYRO. When both position
sensor acquisition stops, TCS emits
alarm but begins navigation utilizing
estimated position made available by
LOG and GYRO. Then it (after 10min)
automatically switches to Radius mode
and manual maneuver will be in effect.
Remove No.1
position sensor
antenna
Remove No.2
position sensor
antenna
2
Disconnect
on a straight leg.
Same as above Remove No.1/2
3
Disconnect position
sensor during max radius
turn.
Alarm will be emitted only from ECDIS
which places no influence on TCS
function.
Remove No.1
position sensor
output connector
during maximum
radius turn.
4
Turn Heading Control
System rudder limit to
min value during min
radius turn.
ot available. Adjustment of
rudder limit is not
available.
5
Disconnect serial
link to heading
controller during
straight leg.
Emits alarm and stops TCS function
simultaneously. It automatically
switches to Radius mode and manual
maneuver will be in effect.
Remove Track
Control connection
from ECDIS while
sailing straight
ahead.
6
Disconnect serial
link to heading
controller during
turn.
Emits alarm and stops TCS function
simultaneously. Automatically switches
to Radius mode and manual maneuver
will be in effect after turning to the pre-
determined maximum degree.
Remove signal
cable exclusively in
use for Auto Pilot
outputted from
ECDIS while
turning.
7
Disconnect speed log
during straight leg/
or turn.
Although emits alarm, two position
sensor data inputted maintains the
normal function.
Remove LOG input
outputted to ECDIS
while turnin
.
8
Simulate failure in
ECDIS.
Same as item 5 or 6. Turn off ECDIS
9
Simulate failure in
connin
ot influential Turn off Conning
Displa
10
Disconnect rudder
feedback.
Emits alarm by Alarm System. If the
deviation between order rudder angle
and actual rudder angle is 5deg or more,
the Alarm System emits alarm and
freezes the actual rudder angle at this
time.
Remove rudder
feedback input
outputted to Alarm
System while
turning.
* This test is
dangerous !
11
Simulate failure in
Autopilot
Emits alarm by Alarm System and stops
TCS function. Rudder angle is frozen at
this time.
Remove power
connection to
autopilot while
turning.
* This test is
dangerous !
12
Simulate failure in
No.1 gyro.
ot influential Switches
automatically
from No.1 to No.2
13
Check that second gyro
is automatic applied in
case of failure in the
active