46
<
Model Basic Setting Procedure
>
ڀ ŪŲŃƗƒŃŷŤťůŨŃŲũŃŦŲűŷŨűŷŶ
&RQÀUPWKDWWKHUDWHRIWKHVORZHVWSRVLWLRQRI
WKHVWLFNLVLQLWLDOVHWWLQJ
%HVXUHWKDWZKHQVHWWRKLJKVLGHWKHFXUYH
RIDQ\FRQGLWLRQGRHVQRWH[FHHG
([DPSOHRISLWFKFXUYHVHWWLQJ
&DOOWKHSLWFKFXUYHRIHDFKFRQGLWLRQZLWKWKH
condition select switch.
*Pitch curve graph display can be switched to pitch angle
direct reading display.
$3LWFKFXUYH1RUPDO
Make the pitch at hovering approximately +5
º
~6
º
.
Set the pitch at hovering with the stick position at
WKHSRLQWDVWKHVWDQGDUG
*Stability at hovering may be connected to the throttle curve.
Adjustment is easy by using the hovering throttle function
and hovering pitch function together.
%3LWFKFXUYH,GOHXS
7KHLGOHXSSLWFKFXUYHIXQFWLRQFUHDWHVDFXUYH
PDWFKHGWRDLUERUQHÁLJKW
Set to -7
º
a
º
as standard.
&3LWFKFXUYH,GOHXS
7KHKLJKVLGHSLWFKVHWWLQJLVOHVVWKDQLGOHXS
The standard is +8
º
.
'3LWFKFXUYH+ROG
$WDXWRURWDWLRQXVHWKHPD[LPXPSLWFKDWERWK
the high and low sides.
[Pitch angle setting example]
7KURWWOHKROG
º
a
º
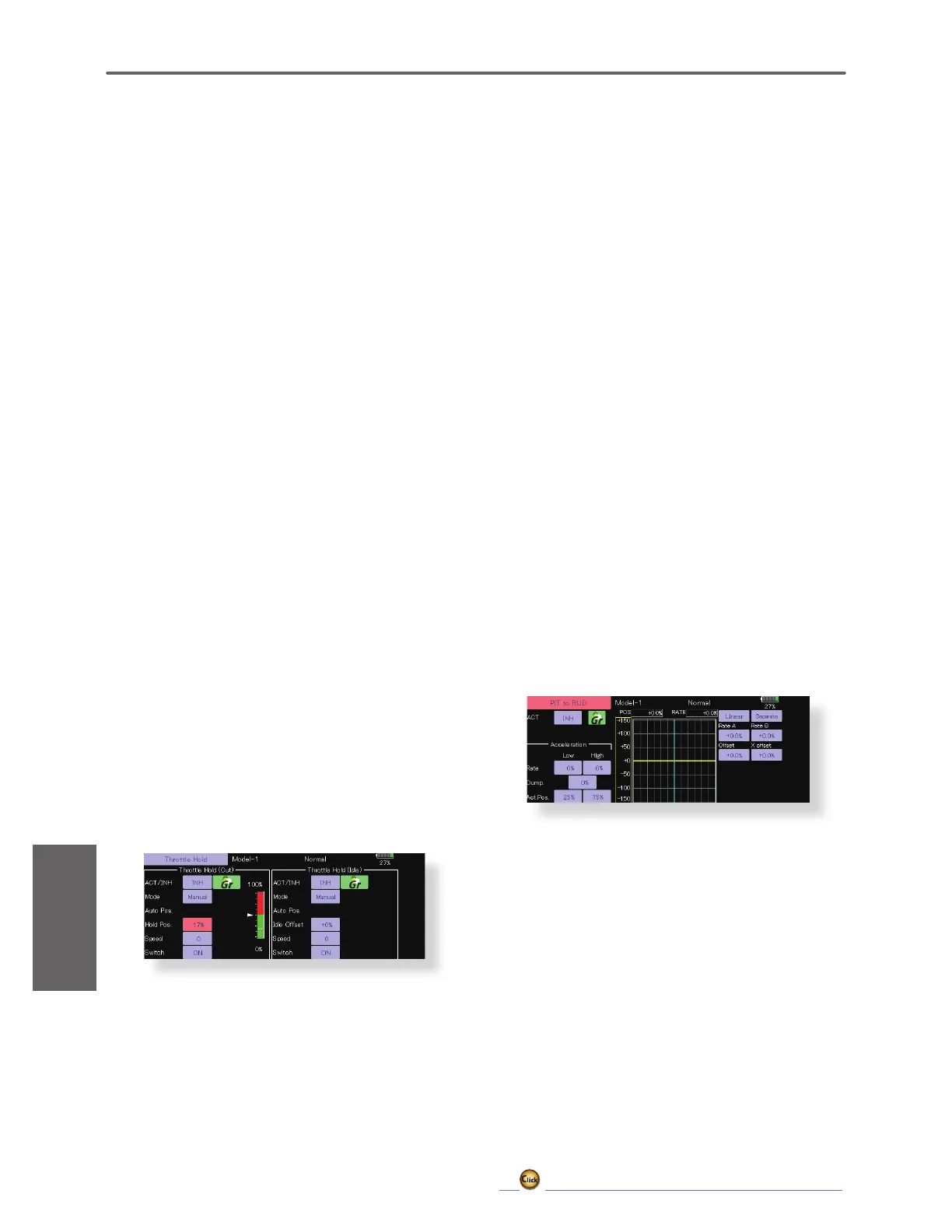
6. Throttle hold setting
Call the Throttle Hold function from the Model Menu and
switch to the throttle hold condition with the condition select
switch.
Note: $WLQLWLDOVHWWLQJWKHVHWWLQJPRGHLVWKH
group mode. Since this function is not used at other
conditions, switch to the single mode before setting.
ŏ6HWWLQJWRWKHVWDWHZKLFKDFWLYDWHVWKHIXQFWLRQ
The throttle hold function allows setting for throttle
FXWDQGVZLWFKLQJRIWKHIXQFWLRQÀ[HGDWWKHLGOH
position by switch for training. Either one or both
functions can be performed.
ŏ+ROGSRVLWLRQVHWWLQJ
This function sets the servo operation position at
throttle hold. (Throttle cut and idle positions)
ŏ2WKHUVHWWLQJV
When you want to link operation with stick
PDQLSXODWLRQWKH$XWRPRGHFDQEHVHW
:KHQ\RXZDQWWRDGMXVWWKHVHUYRVSHHGDGMXVW
[Speed].
3LWFKWR58'PL[LQJVHWWLQJ
Use this function when you want to suppress the torque
generated by the changes in the pitch and speed of the main
rotor during pitch operation. Adjust it so that the nose does not
swing in the rudder direction. However, when using a heading
hold gyro like those shown below, do not use Pitch to RUD
mixing.
Note:KHQXVLQJD)XWDED*<VHULHVJ\URRURWKHU
KHDGLQJKROGJ\URWKLV3LWFKWR58'PL[LQJVKRXOG
not be used. The reaction torque is corrected at
WKHJ\URVLGH:KHQRSHUDWLQJWKHJ\URLQWKH$9&6
mode, the mixed signal will cause neutral deviation
symptoms and the gyro will not operate normally.
Call the Pitch to RUD mixing function from the Model
Menu, and set the curve for each condition. (At initial setting,
this function is in the "INH" state. To use it, set it to the "ON"
state.)
(17 points curve)
Curve setting of up to 17 points is possible. However, in the
following setting example, a simple curve can be adjusted by
using the [Linear] curve type.
Note:$WLQLWLDOVHWWLQJWKHVHWWLQJPRGHLVWKHJURXS
PRGH,QWKLVPRGHWKHVDPHFRQWHQWVDUHVHWDWLQ
all conditions. When you want to set the selected
condition only, switch to the single mode.
6HWWLQJH[DPSOH!
Call the mixing curve of each condition with the condition
select switch.
+(/,&237(5