6. Control Functions and Parameter Settings
6-11
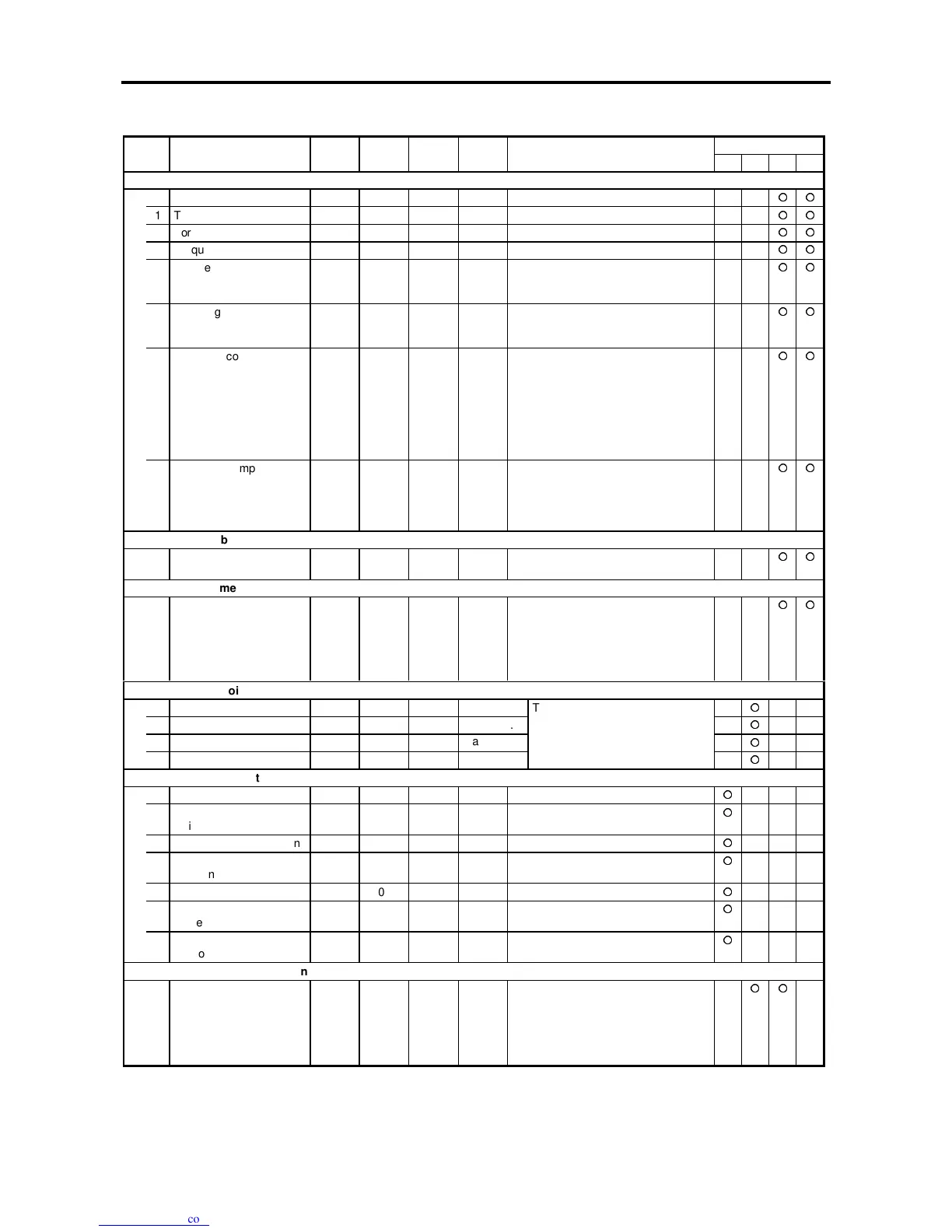
Block-B parameters (Extended function constants) list
ApplicationNo. Parameter Unit Default Min. Max. Function
ST V/f VEC PM
B13 – Local setting
0 Torque setting % 0.0 –300.0 300.0 Torque setting from the keypad
1 Torque ratio 1 setting 1.000 0.001 5.000
2 Torque bias 1 setting % 0.0 –300.0 300.0
3 Torque ratio 2 setting 1.000 –5.000 5.000
4 Double rating speed ratio
setting
% 100.0 0.1 100.0 This sets the torque limit reduction
pattern changeover point. Set as a per-
centage in respect to the base speed.
5 Drooping setting % 0.00 0.00 20.00 By adjusting this parameter, the motor
torque/speed characteristics can be
achieved.
6 ASR gain compensation
in constant power range
% 100.0 0.0 150.0 This sets the ASR P gain
compensation value at the max. speed.
By adjusting this parameter, the ASR
P gain can be compensated in the
constant power range.
If ASR hunting occurs in the constant
power range, (with sensor-less vector
control) set a smaller value.
7 ACR gain compensation
in constant power range
% 100.0 0.0 150.0 This sets the ACR P gain
compensation value at the max. speed.
By adjusting this parameter, the ACR
P gain can be compensated in the
constant power range.
B14 – ASR dead band setting
0 ASR dead band setting % 0.0 0.0 100.0 The non-sensitive range of the ASR
input is set.
B15 – Machine time constant setting 2
0 Machine time constant 2 ms 1000. 1. 20000. This is the time to accelerate the
motor + load to the base speed at the
motor rated torque.
This is valid when the sequence input
machine time constant changeover is
ON (MCH = ON).
B17 – V/f middle point
0 Frequency 2 Hz 0.0 0.0
Max.freq.
1 Voltage 2 % 0.0 0.0 100.0
2 Frequency 1 Hz 0.0 0.0
Max.freq.
3 Voltage 1 % 0.0 0.0 100.0
These parameters should be set:
Base frequency
≥
B17-0
≥
B17-2
B17-1
≥
B17-3
B18 – Over current limit
0 Over current limit % 150. 100. 300.
1 Regenerative current
limit
% 10. 5. 300. Set to 10% if there is not DBR.
2 Torque stabilisation gain 1.00 0. 4.00 Increase if the motor vibrates.
3 Over current limit
function gain
0.25 0. 2.00 Decrease if current hunting occurs.
4 Current stabilisation gain 0.25 0. 2.00
5 Over current break-down
prevention gain
1.00 0. 2.00
6 Over current stall pre-
vention time constant
100. 10. 1001. P control will be applied if 1001 is set.
B19 – Automatic tuning function
0 Automatic tuning
selection
0. 0. 4 The automatic tuning mode is
selected.
1: Basic tuning for V/f Control
2: Extended tuning for V/f Control
3: Basic tuning for Vector Control
4: Extended tuning for Vector Control