6. Control Functions and Parameter Settings
6-14
Block-B parameters (Extended function constants) list
ApplicationNo. Parameter Unit Default Min. Max. Function
ST V/f VEC PM
B31 – Sensor-less control function
0 Flux observer gain 1.20 0.50 2.00 This is the gain for flux observer
feedback.
If in the high-speed operation
range, occurs hunting at the
estimated speed, adjust within
the range of 1.2 to 0.9.
1 Speed estimated proportional
gain
% 0.0 0.0 100.0 This is the proportional gain for
the adaptive speed estimation
algorithm. To increase the
speed estimation response, set
a large value. Note that if the
value is too high, the speed
estimation value will hunt.
2 Speed estimated integral
gain
% 50.0 0.0 100.0 This is the integral gain for the
adaptive speed estimation
algorithm. To increase the
speed estimation response, set
a large value. Note that if the
value is too high, the speed
estimation value will hunt.
3 Regenerative compensation
torque limit 1
% 10.0 0.1 100.0
4 Regenerative compensation
torque limit 2
% 20.0 0.1 100.0
5 Regenerative compensation
low-speed area setting 1
% 10.0 0.1 100.0
6 Regenerative compensation
low-speed area setting 2
% 20.0 0.1 100.0
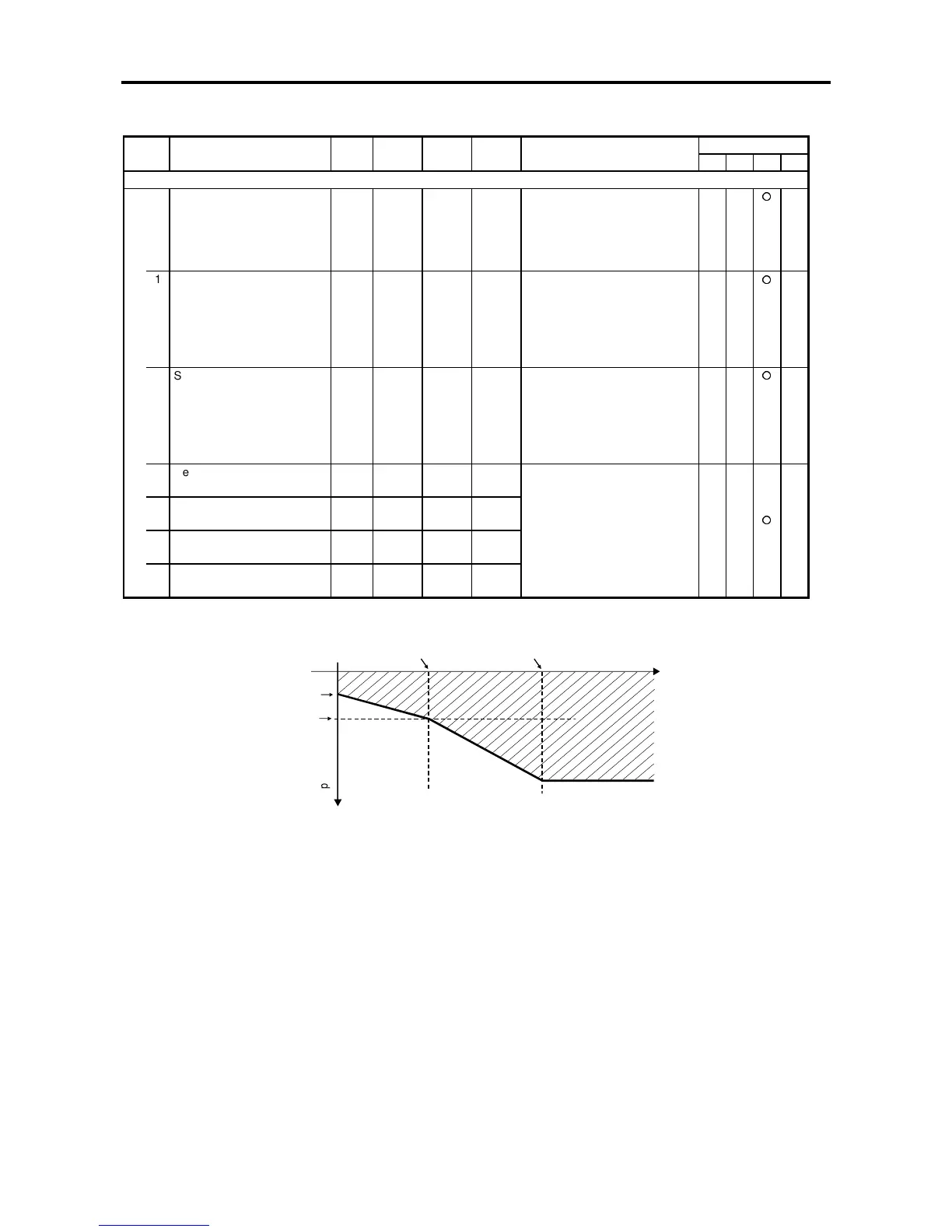
The regenerative torque limit
can be changed in the low
speed area. The shaded area
shows the operating range.
If the operation is unstable at a
point, set the compensation
limits to keep the unstable
region out the shaded area
Output torque
Regeneration
B31-3
B31-5
B31-4
B31-6
Motor speed
Regenerative
torque limit
Regenerative compensation
(B31-3, 4, 5, 6)