Baserunner V6 User Manual
Rev0
Navigate back to the “Basic Setup” tab, check “Enable Virtual Freewheeling,” and
set “Electronic Freewheeling Current” to a value ~25% less than that of the
observed unloaded motor current. The “Motor Stall Timeout” setting determines
when this injection current will stop once the motor comes to a stop.
Once the values for “Virtual Electronic Freewheeling” are set, the controller will
typically draw between 10 to 30 watts in order to overcome the motor’s drag even
after the throttle is released. Regenerative braking will usually recapture more
energy than is used by the injection current.
Users of mid-drive motors can also use this feature to keep the drive train always
engaged, eliminating windup delay and harsh clutch engagement when throttle is
applied and the motor comes up to speed.
Note that when the bicycle has come to a complete stop, the injection current will
only return after the throttle has been applied and released.
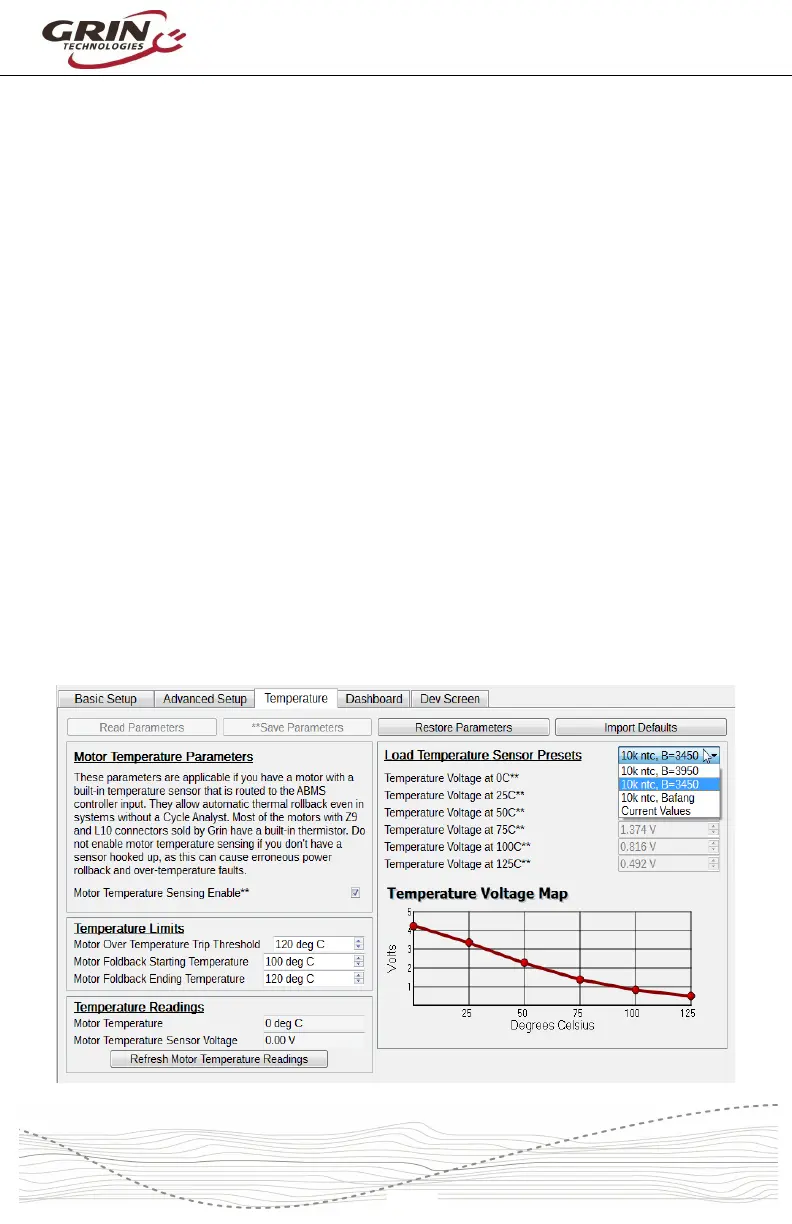
7.7 Motor Temperature Sensing
Temperature tab
The Baserunner V6 has the ability to sense motor temperature and prevent the
motor from overheating by automatically rolling back the max phase current. An
entire tab in the software suite is dedicated to the motor thermal rollback settings.
A six point table maps the voltage that corresponds to the temperatures of 0°,
25°, 50°, 75°, 100°, and 125°C. For convenience we have provided a drop-down
selection of the three thermistor types commonly used on hub motors. These
values can be input manually for compatibility with other temperature sensors.