Baserunner V6 User Manual
Rev0
7.10.1 Speed Computation
The Baserunner V6 has multiple options for determining how vehicle speed is
determined. With direct drive motors, the vehicle speed is derived from the motor
RPM and wheel diameter rather than any external signals. This is ensured by
setting the wheel speed signal source parameter to Hall A and will be set that
way by our default motor profiles.
For geared motors that freewheel or mid-drive motors, the motor RPM is not
directly tied to the wheel and the Baserunner V6 requires some other input signal
to determine the vehicle speed when the motor is not running. This would be fed
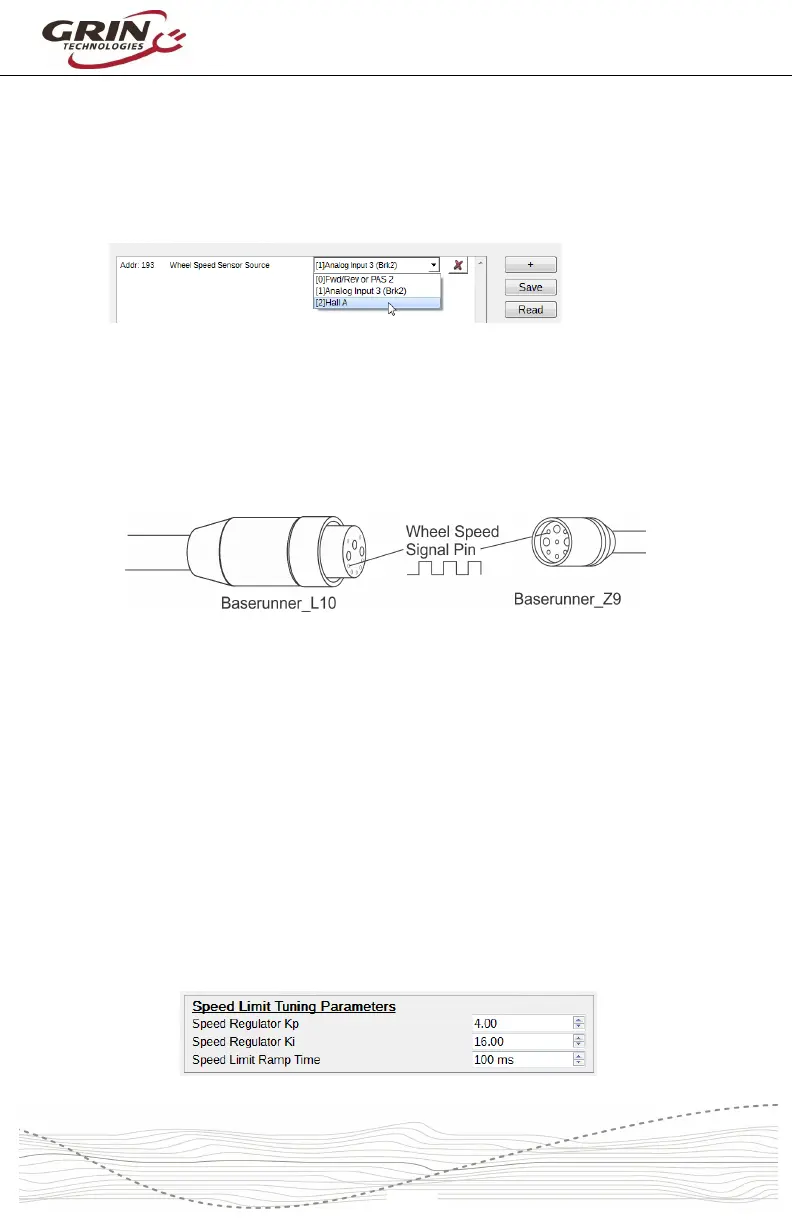
into the wheel speed signal line of the L1019 connector or the Z910 connector,
and the “Wheel Speed Sensor Source” must be set to “Analog Input 3(Brk2)”.
See section 8.3 for more details.
The “Wheel Sp. Sensor Pulses per Rev” and “Wheel Diameter” must then be set
accurately for correct calculation of vehicle speed. Geared hub motors with
speed sensors typically have 6 pulses, while a solution using a spoke magnet
would be 1 pulse per rotation. A setting of ‘0’ forces the controller to use the
motor rotation for vehicle speed regardless of signal source.
7.10.2 Speed Limit Control Loop
Advanced Setup tab
Any time an electric motor is asked to drive at a fixed speed, a set of control
parameters determines how the power is scaled back as the limit is reached so
that a stable speed is maintained under changing loads without overshoot or
oscillations. The total inertia of the vehicle and torque output of the motor will
impact this behavior, and these values may need adjustment if the speed limit is
not smooth.