Chapter 3. Wiring and Signals
3-16
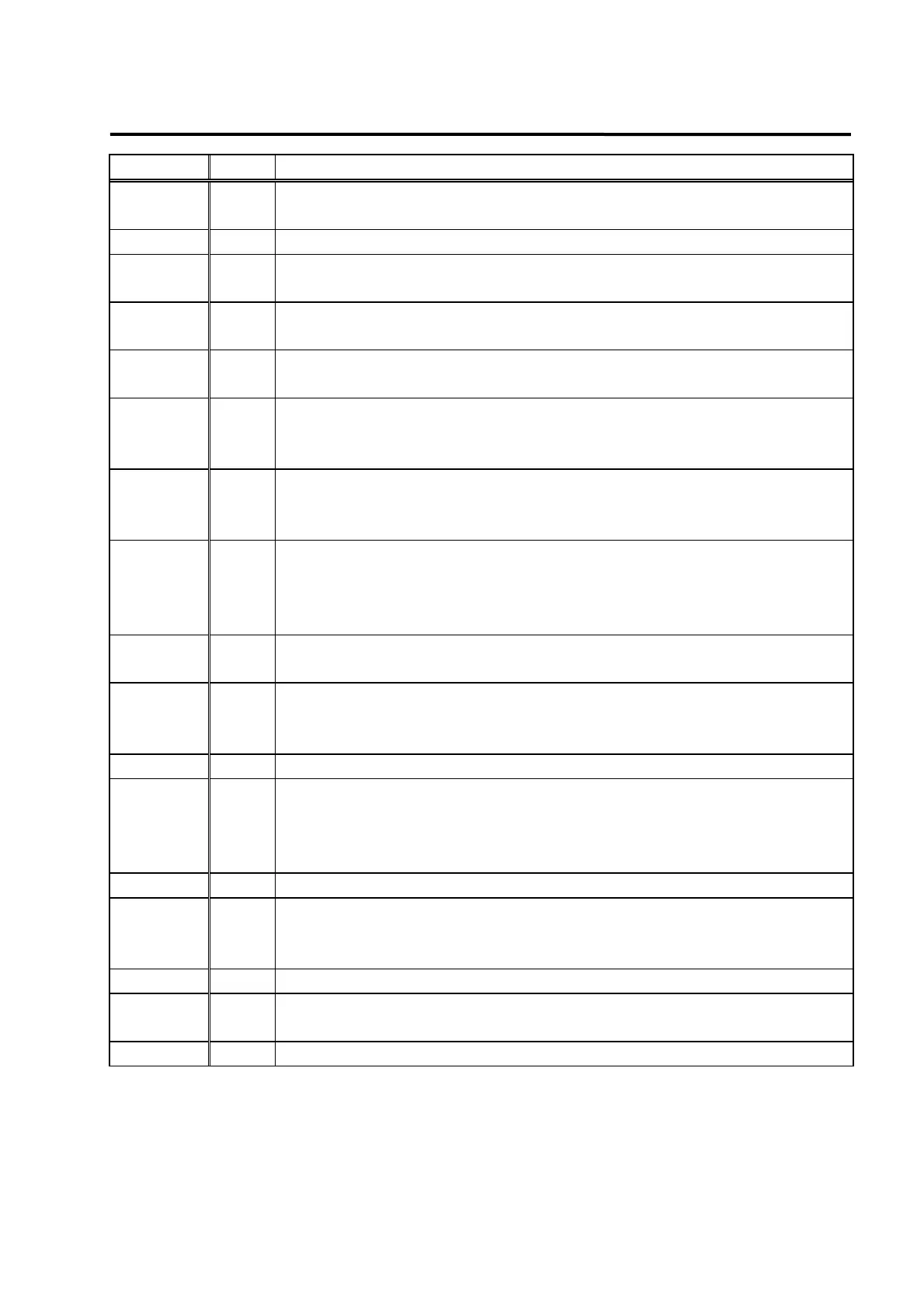
Name Pin No. Function and use
DIR 16
Selects direction of servo rotation when controlling speed
(Off: in command direction, ON: in reverse command direction)
PI/P 41 Selects speed controller type. (Off: PI control, ON: P control)
STOP/
START
13
Forcibly zeros (stops) speed command value, or starts operation.
(Can be selected from parameter P2-29)
CCWLIM
CWLIM
15
40
In the case of linear drive, set the extreme limit switch signal to CW side and CCW side.
(ON: Rotation able; Off: Rotation unable)
TLIM 14
Selects whether the torque limit signal input at the analog torque limit command (TRQIN)
terminal is to be used. (ON: Analog torque limit used, OFF: Digital torque limit used)
ALMRST/
CLR
38
Resets alarm.
Clears error pulse between the command pulse and current position when controlling
position.
ESTOP 39
In case of external emergency, forcibly ignores all input status of servo driver and stops
motor drive (free-run) after rapidly decelerating the motor.
(Contact can be selected from parameter P2-30)
+24VIN 49
Input external power supply greater than +24 (VDC) ±10% 1.0 [A] for external I/O contact
(Shall be provided by user).
* Note) If used as I/O contact power supply simultaneously, recalculate the power
supply capacity according to the number of output points.
GND24 24,25
Connect the ground of the external I/O contact power supply
+24 (VDC) ±10% (Shall be provided by user).
BRAKE 48
This is the output signal intended to drive external brake.
See [Brake SPD (P2-09)], [Brake time (P-10)] of [Control mode (P2--)].
(If this is turned ON, brake power is applied, enabling motor operation.)
RDY 21 This is No Alarm, Power Good status when power is turned ON.
INSPD/
INPOS
22
Turned on when the instructed speed is reached.
(See [In speed range (P3-23)])
Turned on when the instructed position is reached.
(See [In position (P4-04)]
ALARM 20 Turned off if alarm is detected. (Turned on during normal operation)
A_CODE0
A_CODE1
A_CODE2
45
19
44
Output status varies according to alarm types.
This signal is used when it is necessary to check the servo alarm status from the external
upper control system.
ZSPD 47 Indicates servo motor has stopped.
TRQOUT 46
Indicates servo motor is under torque limit when used as position control and speed control.
Indicates torque mode is operating when used as torque control.
FG 50 Connects earth cable of CN1.
Where ON: Applicable contact connected to "GND 24"
OFF: Applicable contact connected to "+24V", or applicable contact not connected.