Chapter 6. Parameter Setting
6-24
6.6 Position control parameters (Position Mode: P4--)
(Caution !) Menus marked with "*" cannot be corrected during Servo-On.
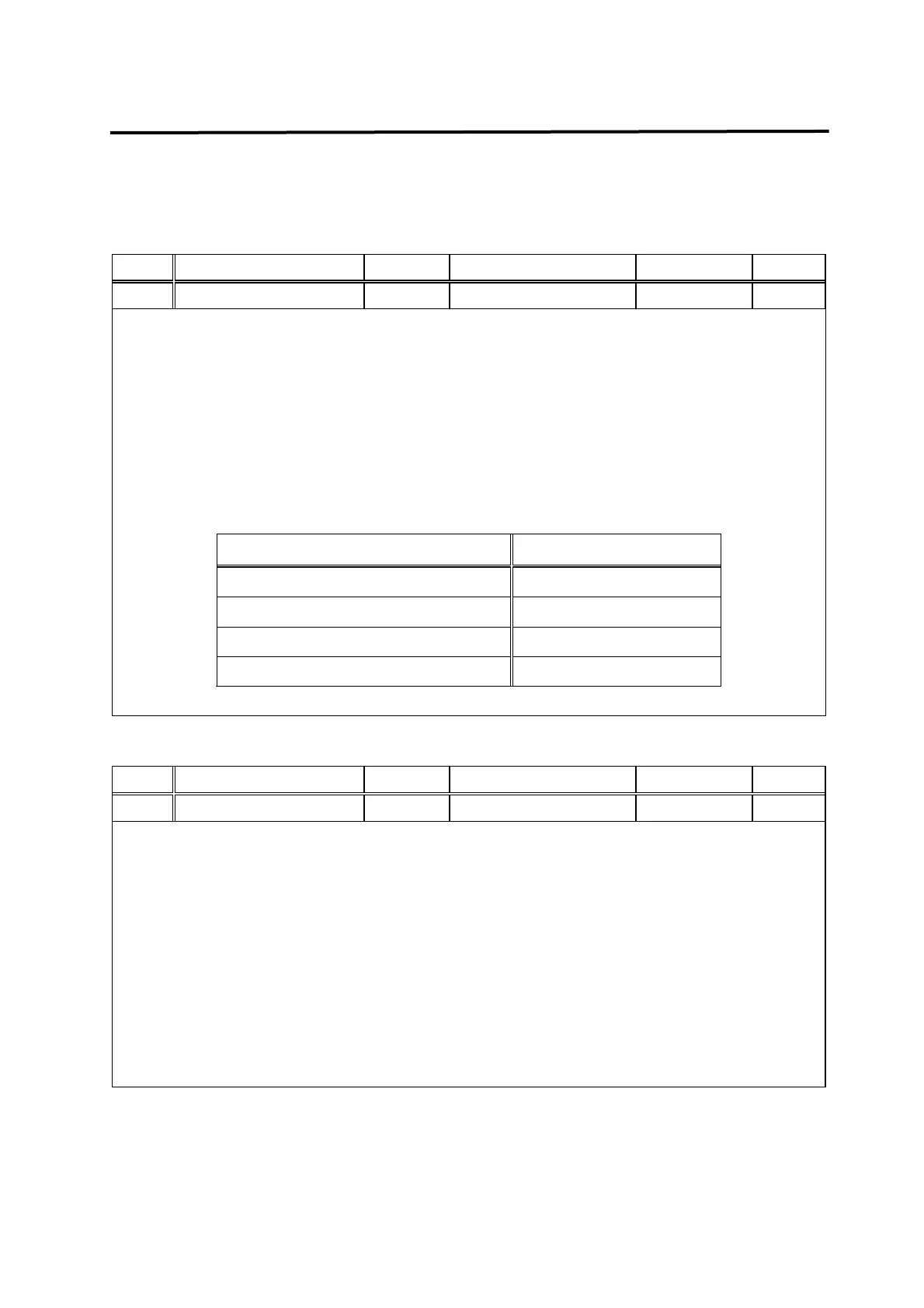
Menu Menu name Unit Display range Initial value Mode
P4-01 Feedforward[%] % 0 ~ 100 0 P
Input the Feedforward rate of the position command speed in [%]. The delay element of the
position controller can be reduced if the value of this item is increased. However, if the value
is increased excessively, overshoot may occur on the position system, or performance of
the position controller is deteriorated. Select appropriate value. If this value is 0, the position
controller becomes a simple position proportional controller.
Refer to the following MAX [Feedforward] value for each K=[SC LOOP Gain]/[PC P Gain]
value.
K= [SC LOOP Gain]/[PC P Gain] MAX[Feedforward]
5 Not exceeding 70
7 Not exceeding 80
10 Not exceeding 85
20 Not exceeding 90
Menu Menu name Unit Display range Initial value Mode
P4-02 FF FLT TC[ms] ms 0 ~ 10000 0 P
Input the primary filter time constant of the position command speed Feedforward in [ms].
The loaded position command is differentiated and passes through the primary filter before
it is used as the Feedforward input. The time constant of this filter can be adjusted. Increase
this value in applications where the position command is rapidly changed, and decrease this
value in applications where the position command is slowly changed. Input 0 in case it is not
needed to use this filter.
(Recommended setting conditions)
F FLT TC] ≤ 1000 X (MAX[Feedforward] -[Feedforward]/100/[ PC P Gain]