Chapter 5. Mount Loader Operation
5
-1
5. Mount Loader Operation
Prior to connecting power and turning ON the servo, check the parameters [Motor parameters
(P1--)] related to the motor at the digital loader. In order for the servo system to operate
satisfactorily based on the information on the motor connected to the servo, accurate value must
be set.
Next, monitor [Status Window (St--)] and verify that all commands and limit values are properly
set.
For initial operation, verify certain degree of stability through autotuning and trial operation (jog,
simulation). Autotuning can be achieved through on-line system, but it is not necessary to use
this function in case stabilized control gain is acquired through off-line system.
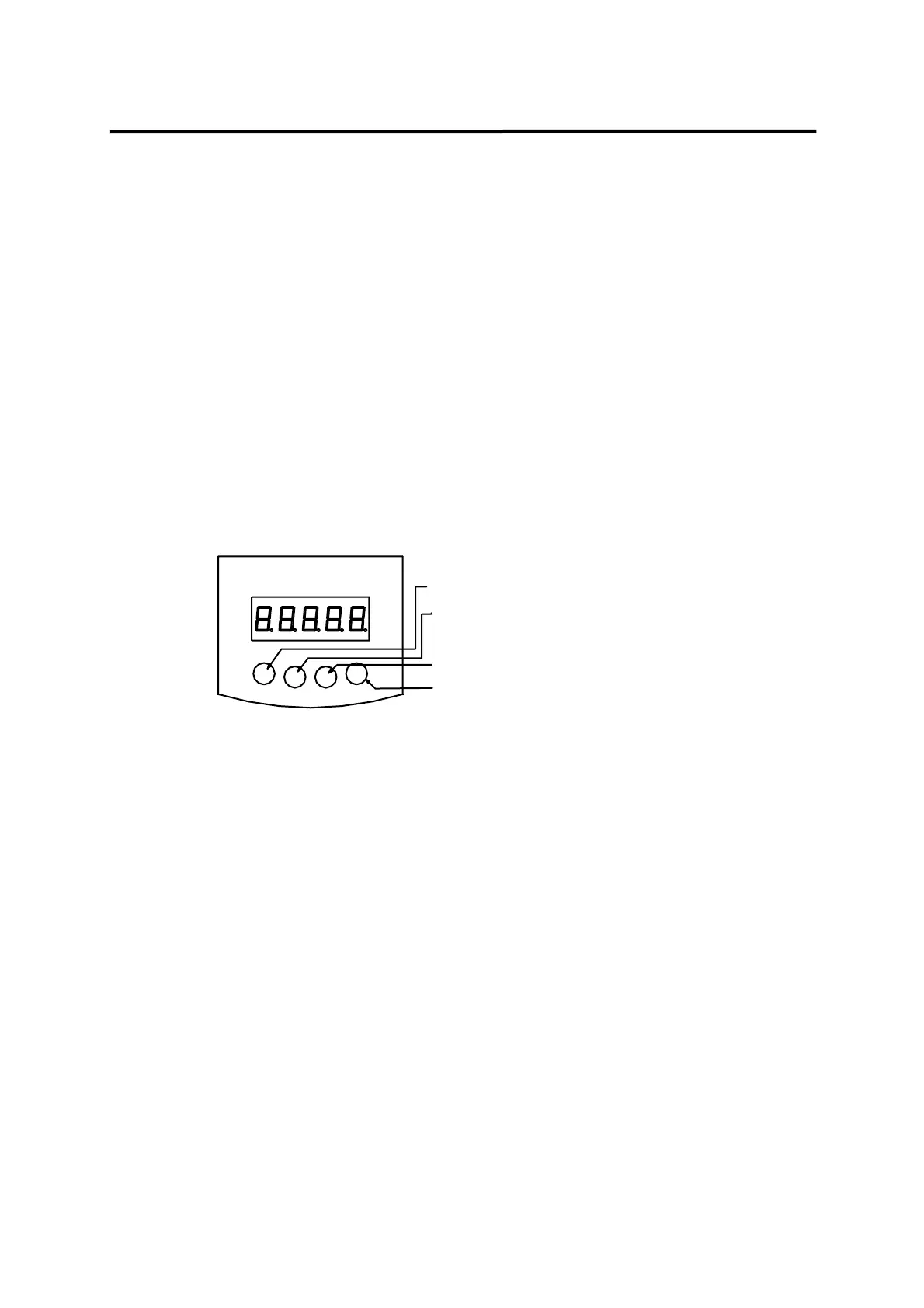
LEFT
RIGHT UP
ENTER
Coverts to sub-menu
move cursor to right
Converts to sub-menu
move cursor to left
Converts main menu
increases figure 1 at a time in edit mode
Starts editing, Stores data
Figure 5.1 Rough sketch of mount loader
 Loading...
Loading...