2. Wiring and connection
2-21
In case of external emergency, it overrides all input
condition of the servo drive and quickly decelerates the
motor to free run the motor.
You can select the ON/OFF contact point in parameter
P02-26.
It selects the type of speed controller.
(OFF:PI control ON:P control)
It starts or stops the motor operation.
You can select the ON/OFF contact point in parameter
P02-25.
When setting P02-25 to “OFF”
(Close: Stop Open: Start)
♥ For details on the input contact point function change, refer to the P07 mode of Chapter 3.
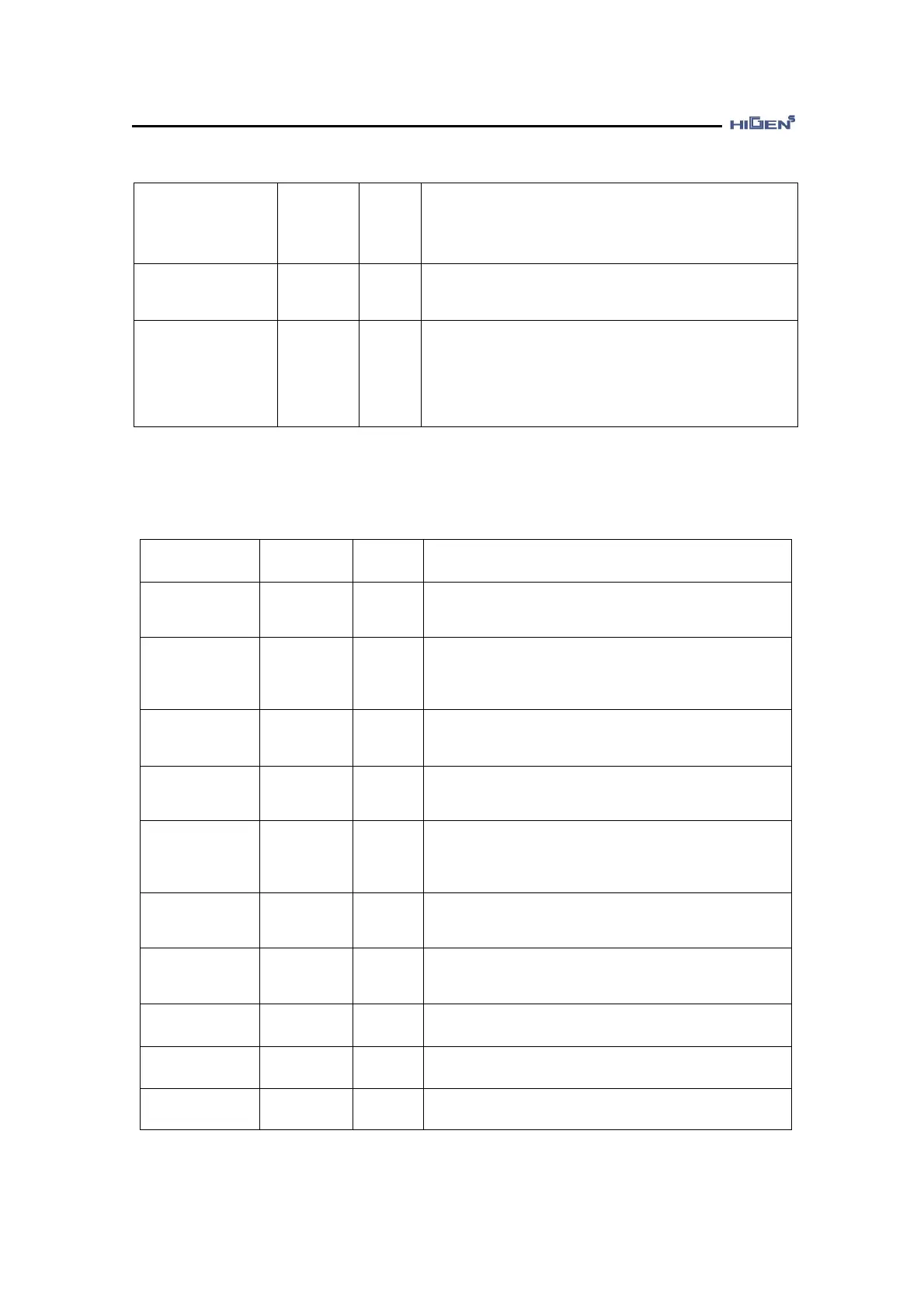
2.5.4. Output signal function table (manufactured default)
Function and usage explanation
You can directly set the input contact point function
from P7-01. (Manufactured default : Not use)
This is the output signal to operate the external
brake.
When on, the brake power is supplied to enable
motor operation.
No alarm, power good condition when the power is
on.
Speed/Position
/Torque reach
completion
It goes on when it reaches the commanded
Speed/Position/Torque.
When used for speed control mode, it indicates the
condition of the torque the servo motor is limiting.
When used for torque control mode, it indicates the
condition of the speed the servo motor is limiting.
This indicates the stopped condition of the servo
motor.
When the alarm is detected, it goes off. During
normal operation, it goes on.
♥ For details on the output contact point function change, refer to the P08 mode of Chapter 3.