Chapter 4 Explanation of Functions
4-158
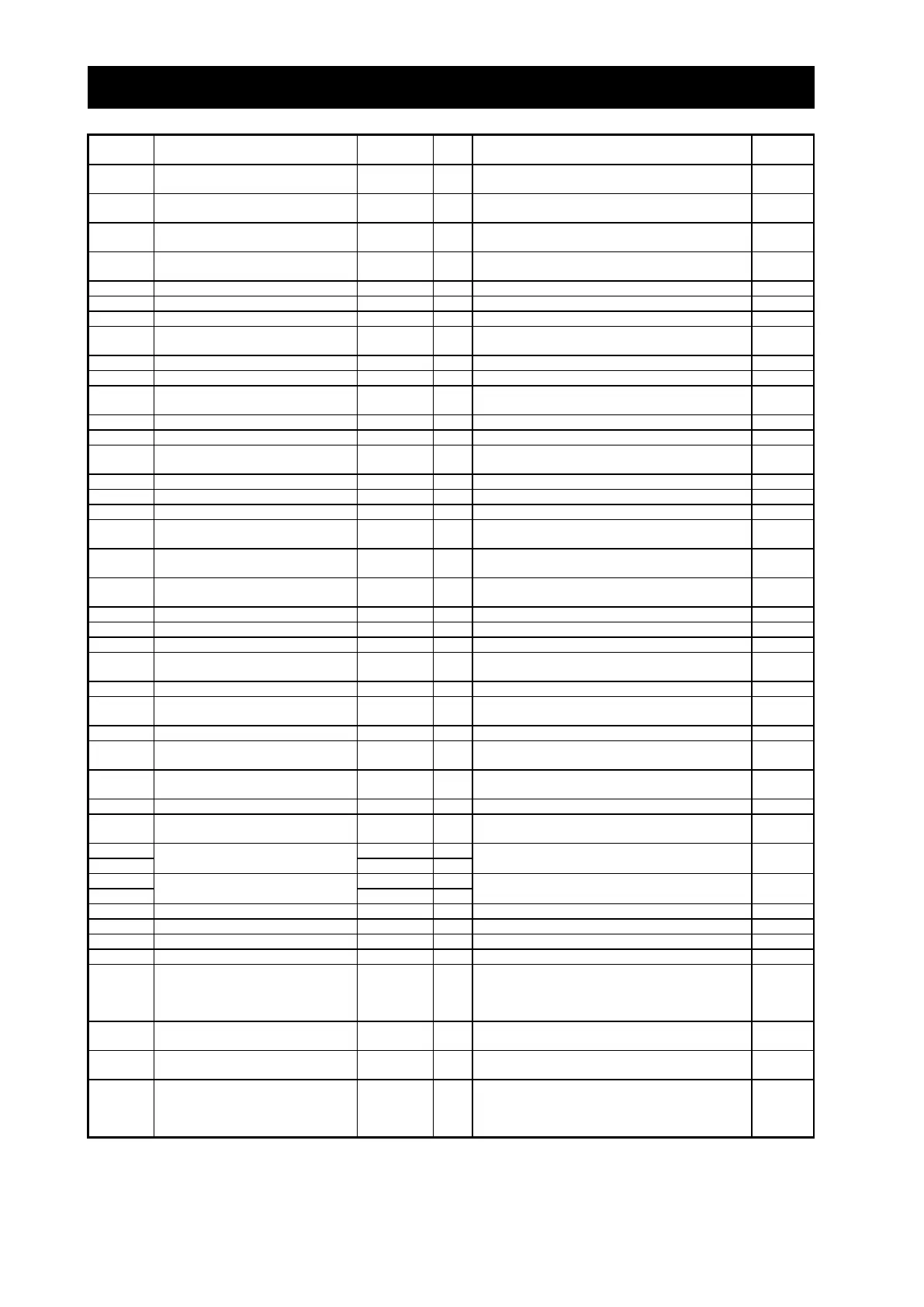
Monitoring and setting items Data resolution
Operation mode on expansion card 1
error
0 (tripping), 1 (continuing operation)
Operation mode on expansion card 2
error
0 (tripping), 1 (continuing operation)
Encoder pulse-per-revolution (PPR)
setting
0 (mode 0), 1 (mode 1), 2 (mode 2)
Home search stop position setting
Home search speed setting
"start frequency" to "maximum frequency " (up to
12000)
Home search direction setting
Home search completion range setting
Home search completion delay time
setting
Electronic gear set position selection
0 (feedback side), 1 (commanding side)
Electronic gear ratio numerator setting
Electronic gear ratio denominator
setting
Feed-forward gain setting
Position loop gain setting
Temperature compensation thermistor
enable
00 (no compensation), 01 (compensation)
Over-speed error detection level
setting
Speed deviation error detection level
setting
Numerator of the motor gear ratio
Denominator of the motor gear ratio
Accel/decel time input selection
0 (digital operator), 1 (option 1), 2 (option 2), 3 (easy
sequence)
Positioning command input selection
0 (digital operator), 1 (option 1), 2 (option 2)
Torque command input selection
0 (O terminal), 1 (OI terminal), 2 (O2 terminal), 3
(digital operator)
Polarity selection at the torque
command input via O2 terminal
0 (as indicated by the sign), 1 (depending on the
operation direction)
0 (disabling the mode), 1 (digital operator), 2 (input
via O2 terminal)
Torque bias polarity selection
0 (as indicated by the sign), 1 (depending on the
operation direction)
Speed limit for torque-controlled
operation (forward rotation)
0 to "maximum frequency "
Speed limit for torque-controlled
operation (reverse rotation)
0 to "maximum frequency "
DeviceNet comm watchdog timer
Inverter action on DeviceNet comm
error
0 (tripping), 1 (tripping after decelerating and
stopping the motor), 2 (ignoring errors), 3 (stopping
the motor after free-running), 4 (decelerating and
stopping the motor)
DeviceNet polled I/O: Output instance
number
DeviceNet polled I/O: Input instance
number
Inverter action on DeviceNet idle mode
0 (tripping), 1 (tripping after decelerating and
stopping the motor), 2 (ignoring errors), 3 (stopping
the motor after free-running), 4 (decelerating and
stopping the motor)

 Loading...
Loading...






