Document No: C-41-02490-9
19
3.10 Output
The UST has 3 types of outputs as below.
3.10.1 Output 1 to Output 3
Output 1: When the object is detected in the output region 1, output 1 will switch to OFF state.
Output 2: When the object is detected in the output region 2, output 2 will switch to OFF state.
Output 3: When the object is detected in the output region 3, output 3 will switch to OFF state.
3.10.2 Malfunction output
Sensor has self-diagnosis function as shown in table 3-3; switch from ON state to OFF state.
(*During malfunction state, output 1 to 3 will be in object present state.)
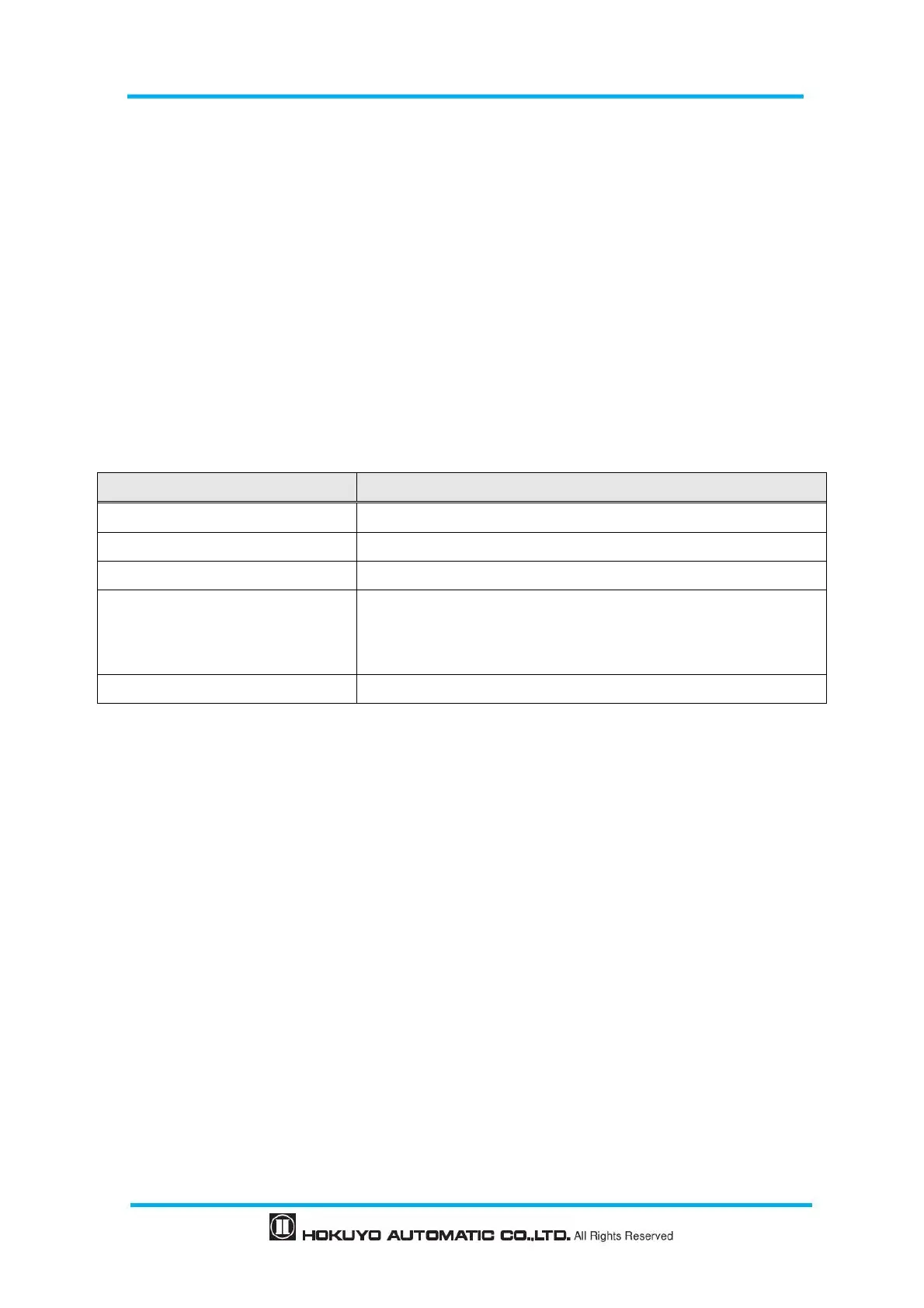
Table 3-3 Malfunction description
Motor is not operating or rotary detection part of motor is damaged.
Laser is not emitting or laser is not able to receive the light.
Synchronization malfunction
When slave sensor could not recognize the signal of master sensor
for 2min.
*In case of Slave (Redundant mode), no malfunction is reported.
When malfunction simulation is operated in “Area Designer”.
3.10.3 Synchronization output
When operating Master/Slave sensors, the synchronization signal is output from master sensor to slave
sensor(s).
3.11 Input
The UST has 2 types of inputs as below.
3.11.1 Input 1 to Input 5
These inputs are used in order to choose detection area. Table 3-1 shows the relation between input states
and corresponding area number.
3.11.2 Synchronization input
When operating Master/Slave sensors, the synchronization output signal from the master is used as input
for the synchronization input of a Slave. For details on the wiring of synchronization operation, refer to
chapter 5 (Synchronization operation)