Shenzhen Hpmont Technology Co., Ltd Appendix A Parameters
HD20 Series Inverters User Manual -125-
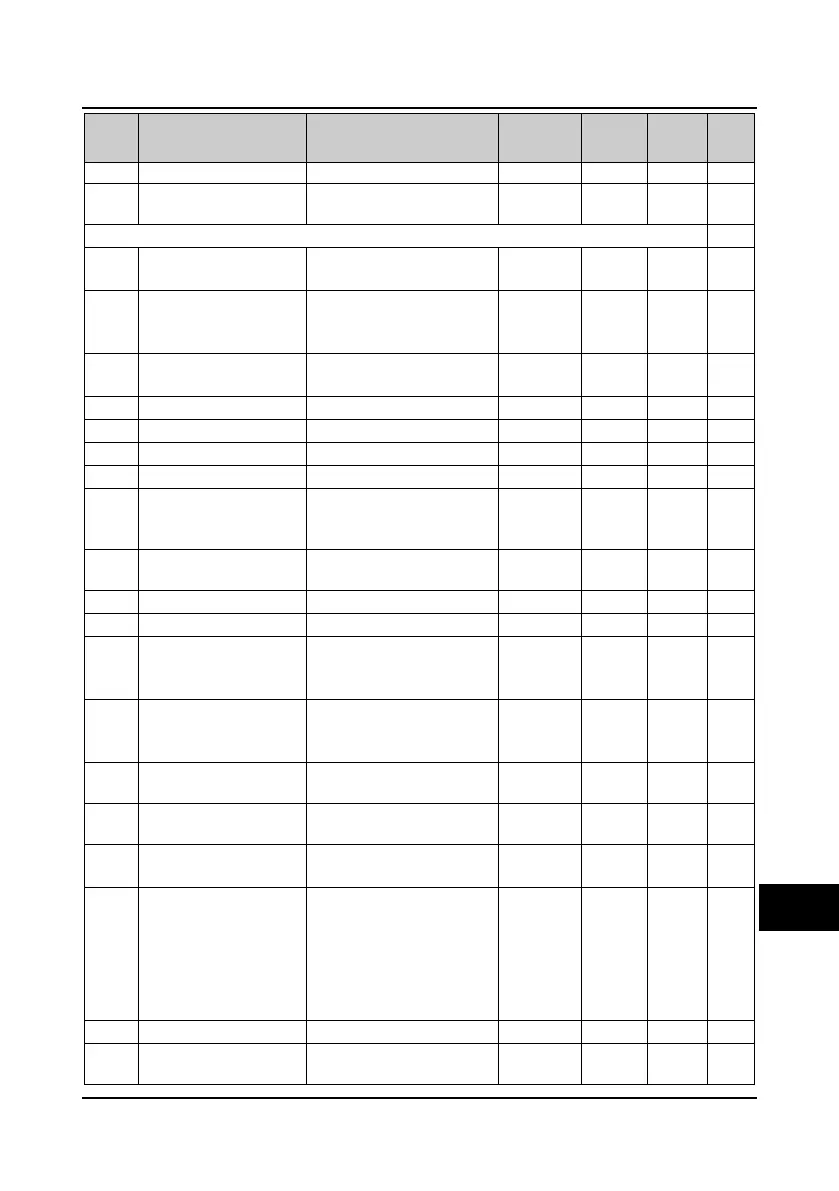
No. Name Range
Factory
Default
Unit
Modified
attributes
Setting
operation
F03.17
Deceleration time of
emergency stop
0.01-600.00s 10.00s 0.01s ○
Group F04 Process PID Control (refer to pages 60
62)
F04.00
Process PID control
selection
0: PID control is disabled
1: PID control is enabled
0 1 ×
F04.01
Reference source
selection
0: Digital reference
1: Analogue reference
2: Terminal pulse reference
0 1 ×
F04.02
Feedback source
selection
0: Analogue feedback
1: Terminal pulse feedback
0 1 ×
F04.03 Setting digital reference -10.00-10.00V 0.00V 0.01V ○
F04.04 Proportional gain (P) 0.00-10.00 2.00 0.01 ○
F04.05 Integral time (I) 0.01-10.00s 1.00s 0.01s ○
F04.06 Integral upper limit 0.00-upper limit 50.00Hz 0.01Hz ○
F04.07 Differential time (D)
0.00-10.00s
The differential is disabled
when F04.07 is set to 0
0.00s 0.01s ○
F04.08
Differential amplitude limit
value
0.00-upper limit 20.00Hz 0.01Hz ○
F04.09 Sampling cycle (T) 0.01-50.00s 0.10s 0.01s ○
F04.10 Bias limit 0.0-20.0% (reference) 2.0% 0.1% ○
F04.11
PID regulator upper limit
source selection
0: Set by F04.13
1: Set by analogue value
2: Set by terminal pulse input
0 1 ×
F04.12
PID regulator lower limit
source selection
0: Set by F04.14
1: Set by analogue value
2: Set by terminal pulse input
0 1 ×
F04.13
PID regulator upper limit
value
0.00-upper limit 50.00Hz 0.01Hz ×
F04.14
PID regulator lower limit
value
0.00-upper limit 0.00Hz 0.01Hz ×
F04.15
PID regulator
characteristic
0: Positive
1: Negative
0 1 ×
F04.16
Integral regulation
selection
0: Stop integral regulation
when the frequency reaches
the upper or lower limit
1: Continue the integral
regulation when the frequency
reaches the upper or lower
limit
1 1 ×
F04.17 PID output filter time 0.01-10.00s 0.05s 0.01s ○
F04.18
PID output reverse
selection
0: PID regulation disable
reverse (When PID output is
0
×
A
 Loading...
Loading...


