Chapter 4 PLC Features
4.2 Commands
4-14 ME0416-1A
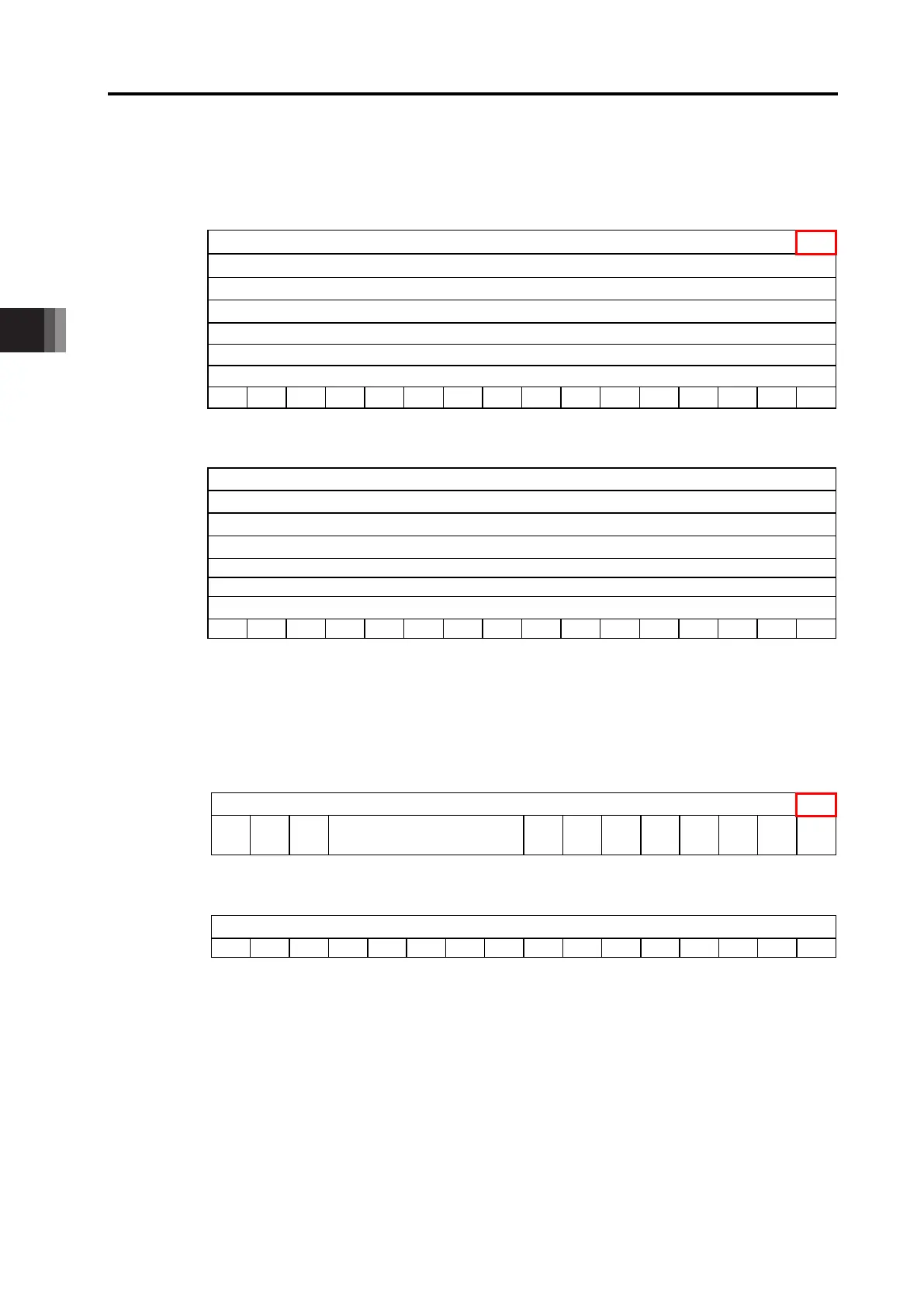
The input and output assignment when set to Direct Numerical Indication is as shown below.
Input and Output Domain Assignment: Direct Numerical Indication
Drv→LC
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
47 46 45 44 43 42 41 40 39 38 37 36 35 34 33 32
63 62 61 60 59 58 57 56 55 54 53 52 51 50 49 48
Current Velocity 79 78 77 76 75 74 73 72 71 70 69 68 67 66 65 64
(Not to be Used) 95 94 93 92 91 90 89 88 87 86 85 84 83 82 81 80
Alarm Code 111 110 109 108 107 106 105 104 103 102 101 100 99 98 97 96
Status Signal 127 126 125 124 123 122 121 120 119 118 117 116 115 114 113 112
Status Signal Name EMGS CRDY ZONE2 ZONE1
- - -
MEND ALML
-
PSFL SV ALM MOVE HEND PEND
LC→Drv
143 142 141 140 139 138 137 136 135 134 133 132 131 130 129 128
159 158 157 156 155 154 153 152 151 150 149 148 147 146 145 144
175 174 173 172 171 170 169 168 167 166 165 164 163 162 161 160
191 190 189 188 187 186 185 184 183 182 181 180 179 178 177 176
Velocity 207 206 205 204 203 202 201 200 199 198 197 196 195 194 193 192
Acceleration/Deceleration
223 222 221 220 219 218 217 216 215 214 213 212 211 210 209 208
Pressing Current
Limit Value
239 238 237 236 235 234 233 232 231 230 229 228 227 226 225 224
Control Signal 255 254 253 252 251 250 249 248 247 246 245 244 243 242 241 240
BKRL INC DIR PUSH
- - -
JOG+ JOG- JVEL JISL SON RES STP HOME CSTR
The input and output assignment when set to Positioned 5 is as shown below.
Input and Output Domain Assignment: Positioner 5
Drv→LC
Current Position 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Completion Position
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
Status Signal Name EMGS CRDY ZONE2 ZONE1 PM8 PM4 PM2 PM1 MEND ALML PSFL SV ALM MOVE HEND PEND
LC→Drv
Indication Position
Number
47 46 45 44 43 42 41 40 39 38 37 36 35 34 33 32
Control Signal 63 62 61 60 59 58 57 56 55 54 53 52 51 50 49 48
Control Signal Name BKRL
- - - - - -
JOG+ JOG- JVEL JISL SON RES STP HOME CSTR
By turning on the bit OM that SON is assigned, the applicable axis can have the search on. Turn
HOME on after the servo gets turned on and complete the home-return operation and turn CSTR
on while the position number or the target position is set, operation to the target position should
be available. Whether operation to the target position is complete can be confirmed in PEND,
completion position number and current position.
 Loading...
Loading...