Chapter 4 Software index
4-14
• When the motor output torque is not enough, increase b14 set value.
• If the motor vibrates or becomes very hot decrease b14 set value.
• If running at low speeds for long periods, high b14 set value can cause the motor to overheat
• The maximum output torque limit is proportional to the inverter rated current.
• If increasing b14 set value causes the output current to be too large, increase b03 set value.
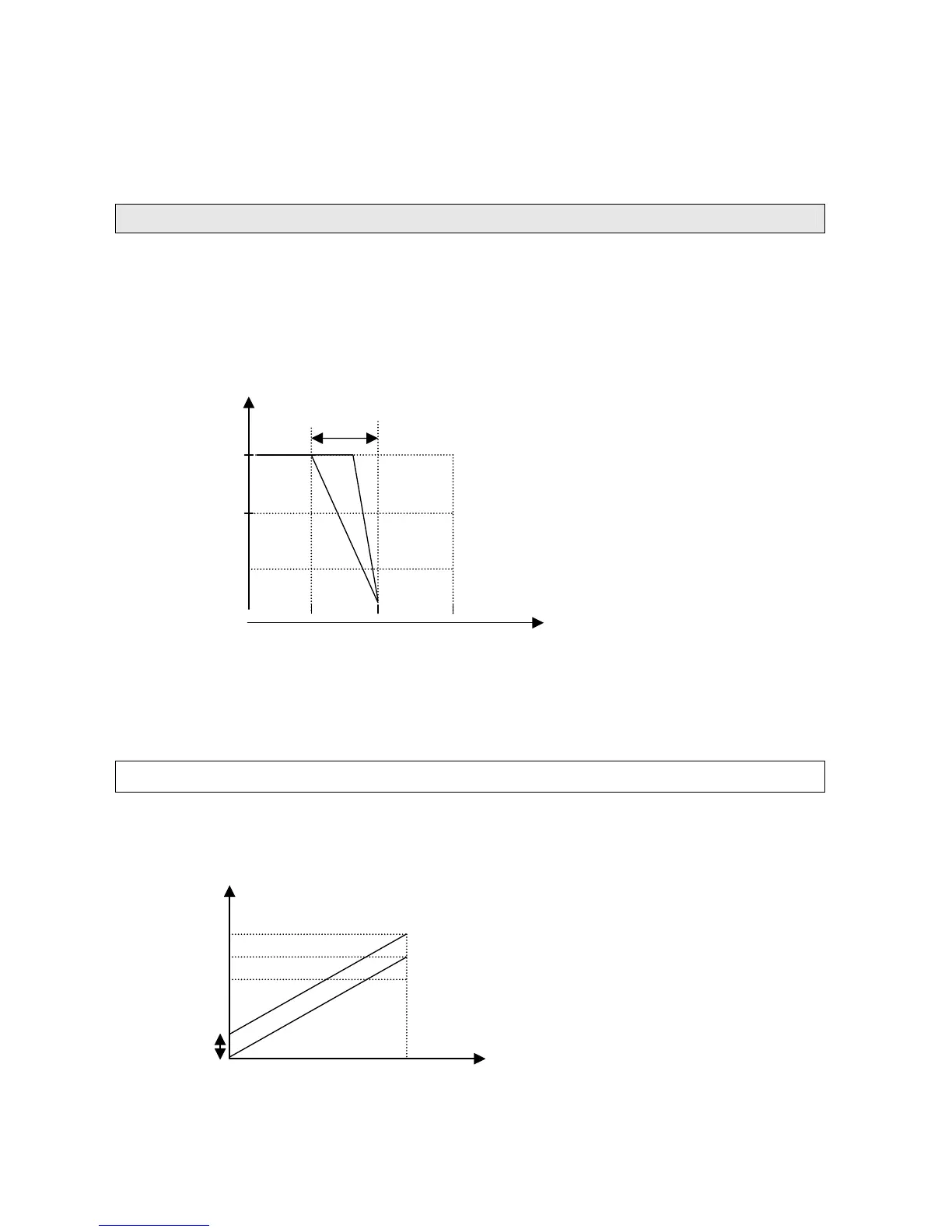
b15 Slip Compensation Gain (Only for vector control, A06 = 000)
If the detected motor load is too large, speed will drop. Increase gain b15 to compensate.
(load current) (slip compensation )
= I ¯ Gain
Δ
F
sli
• Torque/Speed curve pattern:
• Operating frequency range: 0 ~motor rated frequency.
• When the motor load is high, speed will decrease (slip). Increase b15 set value to compensate.
• If the motor vibrates or becomes very hot decrease b14 set value.
• The maximum rotational output speed limit is fixed by the motor maximum set frequency.
b16 Low Frequency DB Voltage Compensation (Only for Vector control, A06 = 000)
Increasing b16 set value will increase output voltage and low frequency torque.
• Output voltage/frequency pattern:
• Operating frequency range:
• At low operating frequency: -
When the motor output torque is not enough increase b16 set value.
A %
B %
C %