- 104 -
5 Troubleshooting
5
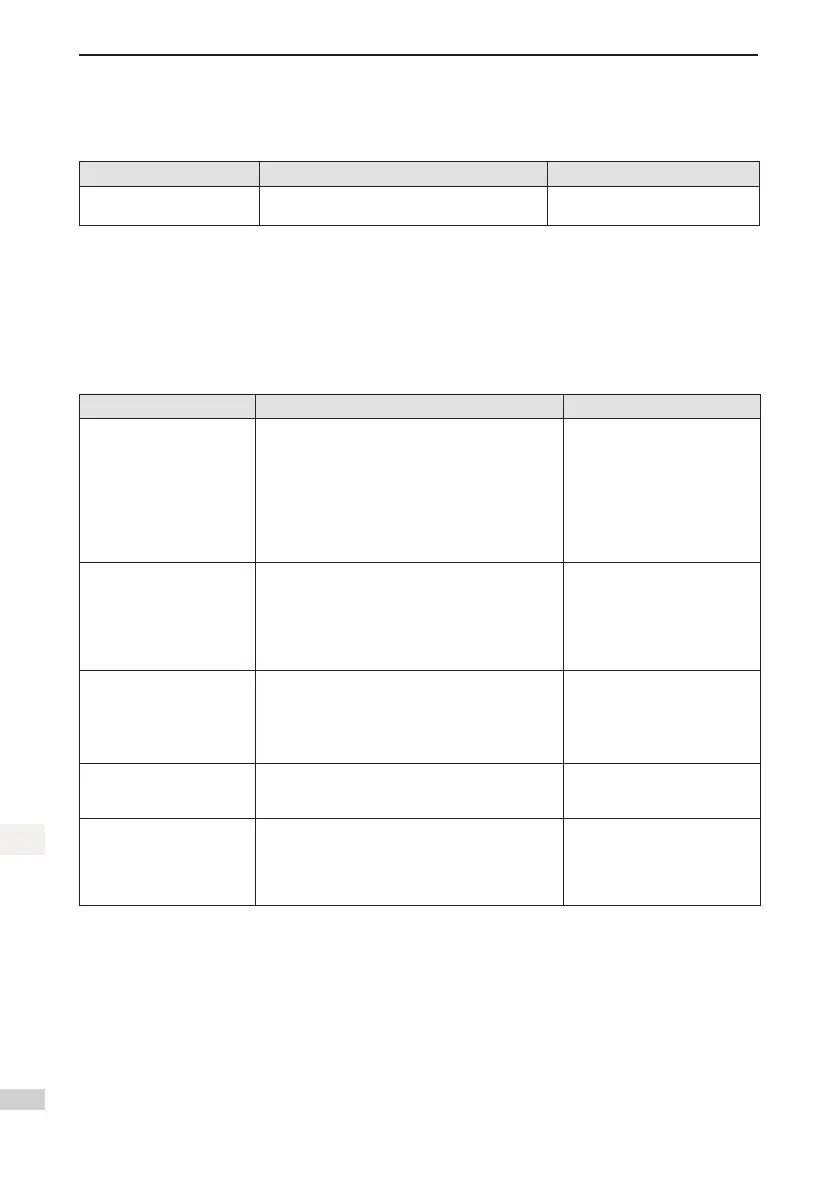
■ E3.602: Angle auto-tuning failure
Cause:
Abnormal jitter is reported by the encoder during the angle auto-tuning.
Probable Cause ConrmingMethod Corrective Action
Encoderfeedbackdata
abnormal
Checkiftheencodercommunicationis
disturbed.
Checktheencoderhardware
wiring.
■ E3.610: Servo drive overload
Cause:
Heat accumulation of the servo drive reaches the fault level.
■ E3.620: Motor overload
Cause:
Heat accumulation of the motor reaches the fault level.
Probable Cause ConrmingMethod Corrective Action
1. Wiring of the motor and
encoder is incorrect or in
poor contact.
Checkwiringsbetweentheservodrive,theservo
motor and the encoder according to the correct
"wiring diagram."
Connect the wirings according
to the correct wiring diagram.
Preferably use the cables
recommended by Inovance.
When self-made cables are
used, prepare and connect
the cables according to the
hardware wiring instructions.
2. The load is too heavy.
Themotorkeepsoutput
of effective torque higher
than the rated torque for
a continuous operation.
Conrmtheoverloadcharacteristicsoftheservo
drive or motor.
Checkwhethertheaverageloadratio(200B-0DH)
is larger than 100% for a long time.
Use a servo drive of larger
capacity and matching servo
motor.
Reduce the load and increase
the acceleration/deceleration
time.
3. Acceleration/deceleration
is too frequent or the load
inertia is too large.
Calculate the mechanical inertia ratio or perform
the inertia auto-tuning. Then view 2008-10h (load
inertia ratio).
Checkthesinglerunningcyclewhentheservo
motor runs circularly.
Increase acceleration/
deceleration time during single
running.
4. The gain adjustment is
improper, or the stiffness
is too high.
Checkwhetherthemotorvibratesandproduces
abnormal noise during running.
Re-adjust the gain.
5. The servo drive or motor
model is set incorrectly.
View the bus motor model in 2000-06h and servo
drive model in 2001-0Bh.
View the servo drive nameplate
and set the servo drive model
in 2001-0Bh correctly and use a
matching servo motor according
to Section 2.3.

 Loading...
Loading...





