- 103 -
5 Troubleshooting
5
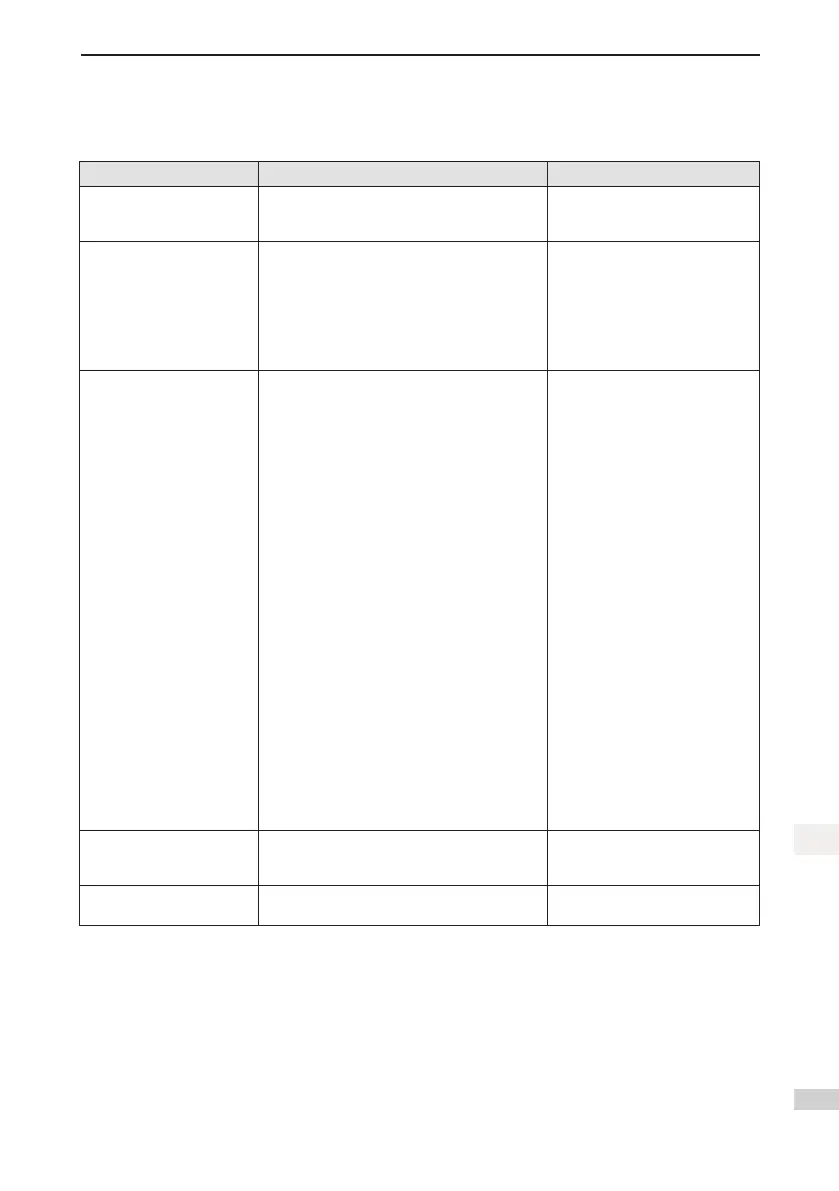
■ E3.500: Motor overspeed
Cause:
The actual speed of the servo motor exceeds the overspeed threshold.
Probable Cause ConrmingMethod Corrective Action
1. UVW phase sequence
of the motor cables is
incorrect.
Checkwhethertheservodrivepowercablesare
in the same phase sequence as the servo drive
UVW cables and the motor UVW cables.
Connect the UVW cables
according to the correct sequence.
2. The setting of 200A-09h
is incorrect.
Checkwhethertheoverspeedthresholdis
smaller than the actual maximum motor speed.
Overspeed threshold=1.2 times maximum motor
speed (200A-09h=0).
Overspeedthreshold=200A-09h(200A-09h≠0,
and 200A-09h < 1.2 times maximum motor
speed).
Re-set the overspeed threshold
according to the actual mechanical
requirement.
3. The input reference is
higher than the overspeed
threshold.
Checkwhetherthemotorspeedcorresponding
to the input reference exceeds the overspeed
threshold.
Positioncontrolmode:
In CSP mode, view the gear ratio
6091-01h/6091-02htochecktheposition
reference increment for a single synchronous
cycle and convert it to speed.
In PP mode, view the gear ratio 6091-01h/6091-
02handcheckthevalueof6081h(prole
velocity).
In HM mode, view the gear ratio 6091-01h/6091-
02h, and determine 6099-01h and 6099-02h.
In speed control mode,
view the gear ratio 6091 h, and the values of
60 FFh (target velocity), 2006-07h to 2006-0Ah,
and607Fh(maxprolevelocity).
Torquecontrolmode:
In torque control mode, view the value of 2007-
12h (speed limit source) and the corresponding
speed limit value.
Positioncontrolmode:
CSP:Decreasetheposition
reference increment for a single
synchronous cycle, and the host
controller needs to increase the
position ramp additionally when
generating references.
PP:Decreasethevalueof6081h,
or increase the acceleration/
deceleration ramp (6083h, 6084h).
HM:Decrease6099-01hand
6099-02h, or increase the
acceleration/deceleration ramp
(609 Ah).
Decrease the gear ratio according
to the actual conditions.
Speedmode:
Decrease the target velocity, speed
limit value, gear ratio. In PV mode,
increase the speed ramp 6083h
and 6084h; in CSV mode, the host
controller needs to increase speed
ramp additionally.
Torquecontrolmode:
Set the speed limit value smaller
than the overspeed threshold.
4. The motor speed
overshoots.
Checkwhetherthe"speedfeedback"exceeds
the overspeed threshold through the Inovance
servo commissioning software.
Adjust the gain or mechanical
running conditions.
5. The servo drive is faulty.
The fault persists after the servo drive is
powered on again.
Replace the servo drive.

 Loading...
Loading...





