User manual of EC160 elevator intelligent integrated machine Function parameters
96
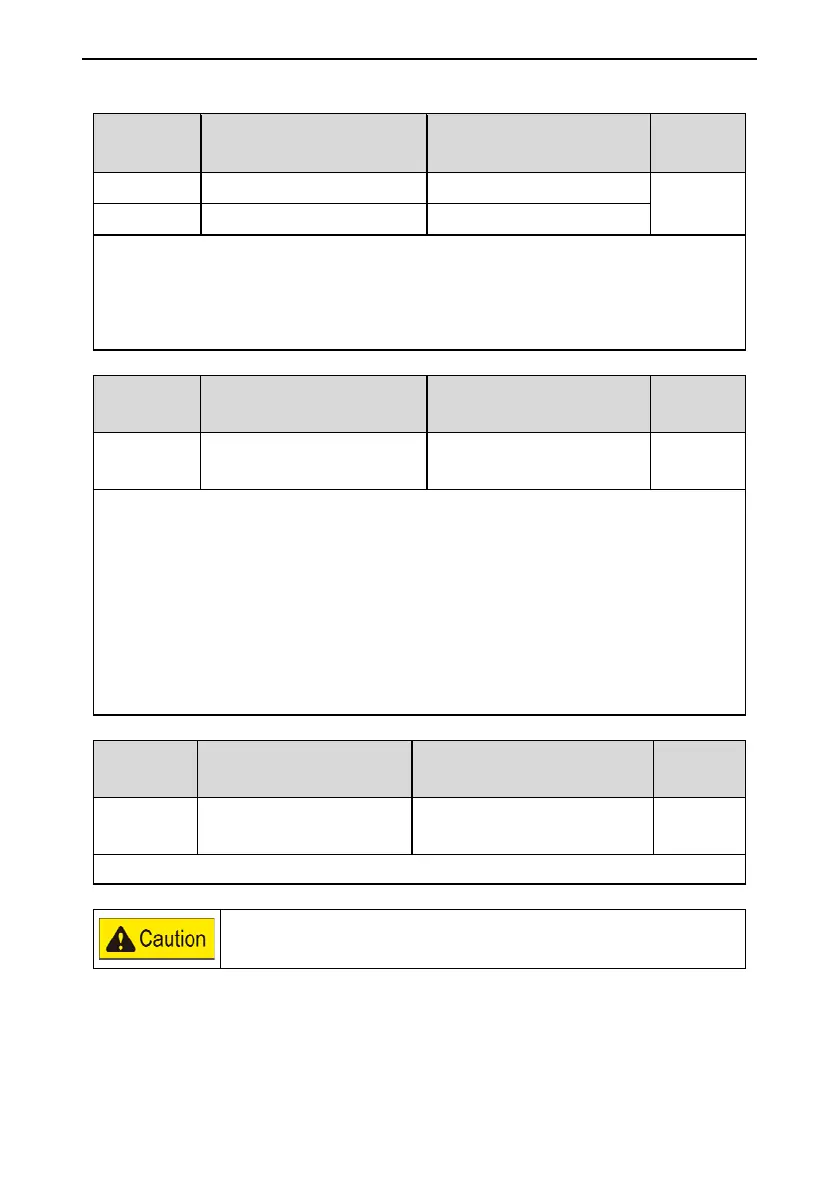
Function
code
Instruction Setting range【default value】 Remarks
P5_00 Input phase loss protection 0-2【0】
Not modify
in running
P5_01 Output phase loss protection 0-1【1】
Above function codes select input/output phase loss protection enabling.
0: Prohibit
1: Enabling
2: Only enabling in running
Function
code
Instruction Setting range【default value】 Remarks
P5_02 Motor overload protection 0-2【2】
Not modify
in running
0: Disabled
1: Normal motor. For normal motor (within the function of low speed compensation), the lower the
speed, the poorer the cooling effect. Based on this reason, if output frequency is lower than
30Hz, inverter will reduce the motor overload protection threshold to prevent normal motor from
overheat.
2: Variable frequency motor. For variable frequency motor (without the function of low speed
compensation),As the cooling effect of variable frequency motor has nothing to do with running
speed, it is not required to adjust the motor overload protection threshold.
Function
code
Instruction Setting range【default value】 Remarks
P5_03
Motor overload protection
current
20.0%~120.0% (rated current of
the motor)
【100.0】
Not modify
in running
Motor overload protection current=(motor rated current/integrated machine rated current)*100%
This parameter is normally used when rated power of the integrated
machine is greater than rated power of motor.