User manual of EC160 elevator intelligent integrated machine Debugging at fast speed
161
8.9.5 Motor noise
Check and adjust P0_07 (6kHz), P4_08, P4_09 and P4_10 if the motor has noise in running.
When the asynchronous motor is running, increase slip corresponding to load direction properly if
output voltage cause master noise.
8.9.6 Relative parameters
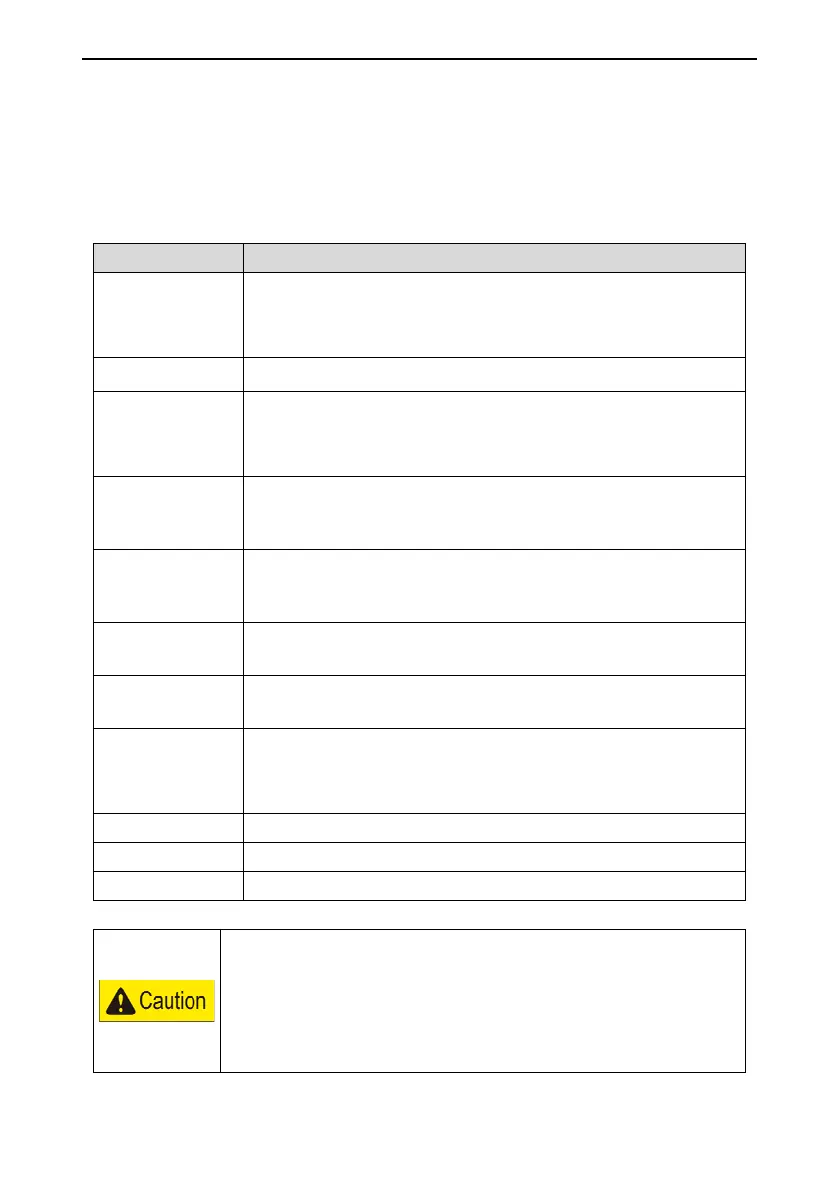
Fast running state Relative parameters
Slide at the heavy
side when starting
For the synchronous motor, enable P4_14, set P4_15, reduce P4_18 and
increase P4_17 (if there is noise after increase, adjust P4_21:
-1000~+4000). Additionally, it is considerable to increase P4_00.
Starting shock Increase P4_18 and reduce P4_17 (for slide, adjust P4_21).
Rapid acceleration
and deceleration
Reduce P1_02 and P1_05. Note: The ratio of acceleration and increasing
acceleration does not exceed 3, neither does the ratio of deceleration and
reducing deceleration.
Vibration during
acceleration and
deceleration
Adjust P4_03, P4_07 and narrow the gap between high and low speed
loop gain
Shock acceleration
and deceleration at
the end
Adjust P1_01 and P1_04
Stopping vibration
Reduce P4_00 or enable current loop switching, reduce P4_08, P4_09
and increase P1_16, P1_17
Slide at the heavy
side when stopping
Increase P4_00 and T0_07
Slide at the running
side when stopping
Increase P4_00 (if there is noise, adjust low-speed integral time to 0.1s),
and reduce torque compensation of current loop filter coefficient bit0~bit2
(not exceed 3)
Low-speed vibration Adjust P4_00, P4_01 and increase P4_08, P4_09
High-speed vibration Adjust P4_04 and P4_05
Entire running shock Adjust P4_08, P4_09, P4_02, P4_06 (not exceed 3) and P4_10
When the elevator changes with load, the characteristics changes (for
example, normal at LL while noise and resonance at FL). Enable
current loop switching and set P4_08/P4_09 to low-speed current loop
proportion and integral, P1_16/P1_17 to high-speed current loop
proportion and integral.