User manual of EC160 elevator intelligent integrated machine Running at slow speed
145
checking the parameters, set according to the actual debugging.
7.3 Static self-tuning of the synchronous motor
Autotuning is needed before the first slow running of synchronous
master, otherwise damage to the machine and motor and physical
injury or death may occur.
The synchronous motor must conduct self-tuning before running; otherwise, damage to the
machine and motor may occur because of incorrect parameters.
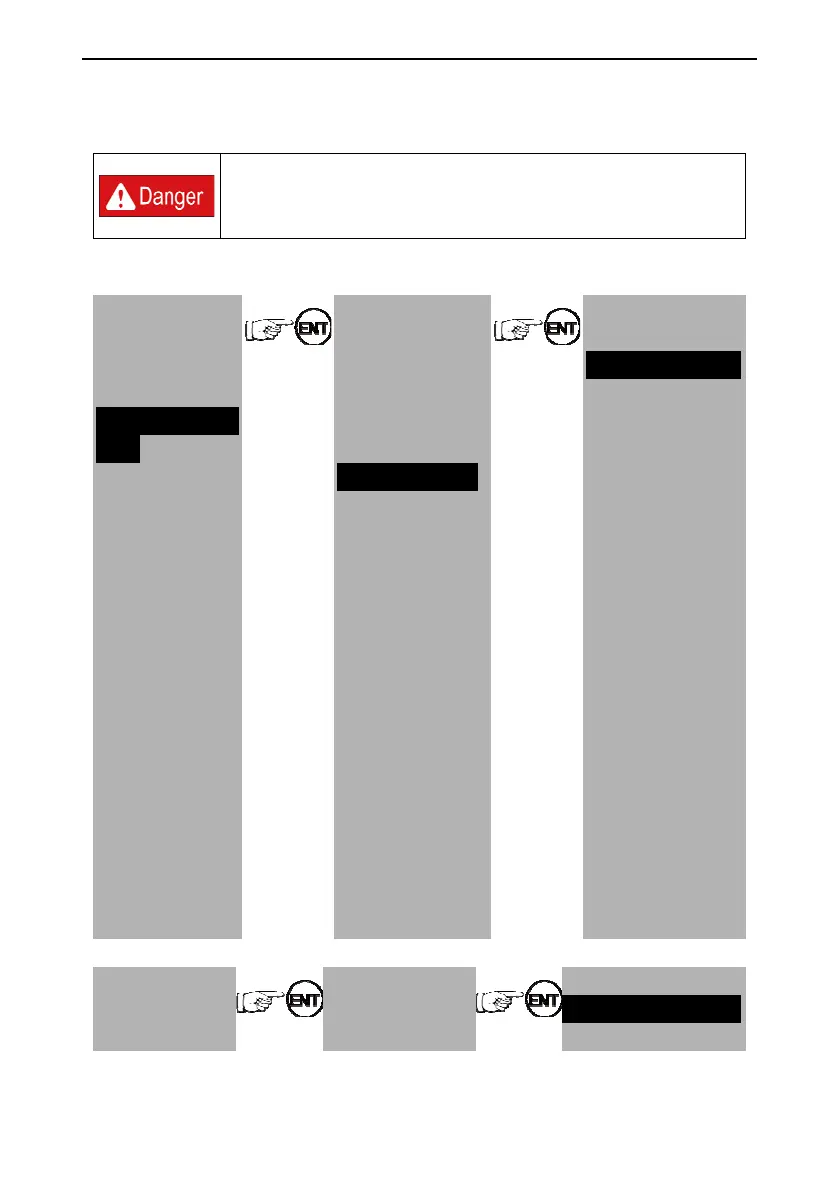
【main menu】
A system control
B fault record
C language selection
D parameters setting
inquiry
E password setting
F system autotuning
G data management
H system information
【parameters setting
inquiry】
P0 master drive
control
P1 speed and
deceleration distance
P2 motor parameters
P3 encoder
parameters
P4 running
comfortability
P5 elevator protection
parameters
P6 communication
setting
P7 drive information
PE factory only
【P2 motor
parameters】
00 motor type selection
01 rated power of the
motor
2 rated frequency of the
motor
03 rated speed of the
motor
04 rated voltage of the
motor
5 rated current of the
motor
06 stator resistor of the
motor
07 rotor resistor of the
motor
08 Motor stator and
rotor inductance
09 Motor stator and
rotor mutual inductance
10 Motor non-load
current
【main menu】
system control
B fault record
【parameters setting
inquiry】
P0 master drive
【P3 encoder parameters】
00 encoder type selection
01 resolution of the