User manual of EC160 elevator intelligent integrated machine Function parameters
91
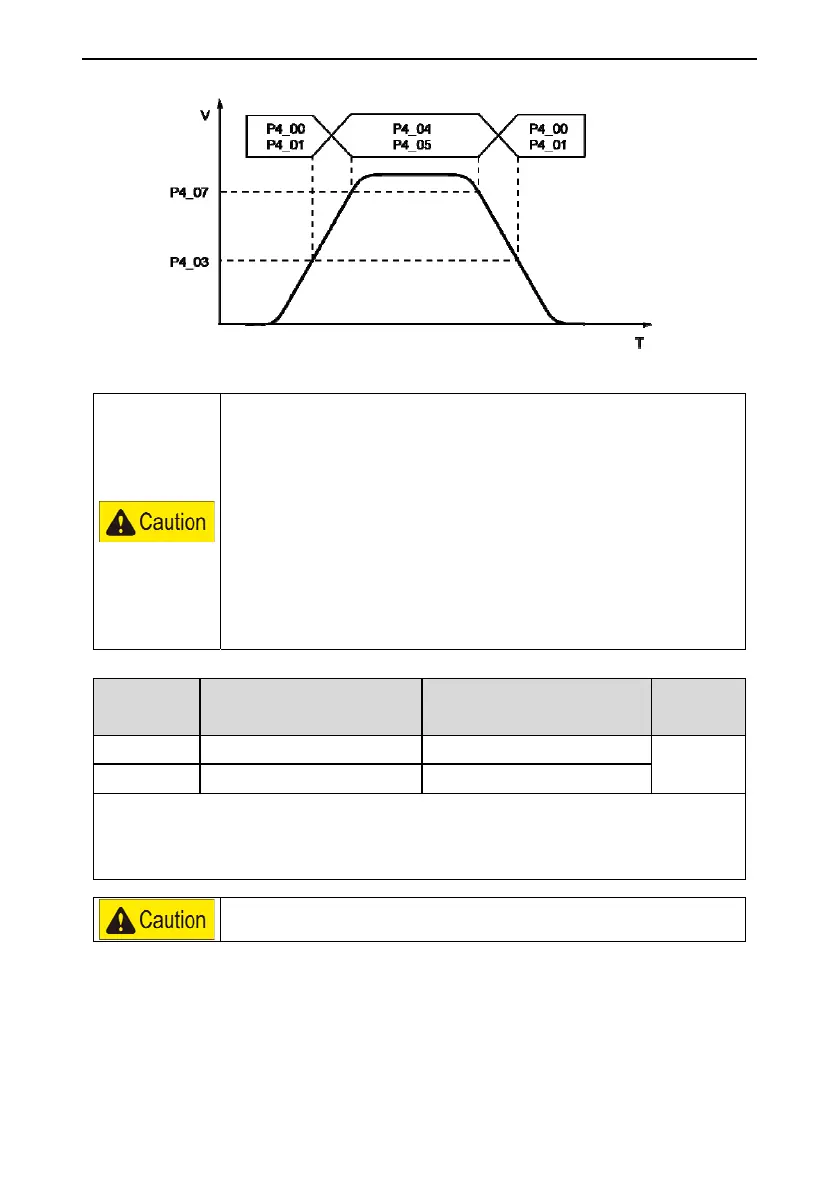
Figure 6-2 Parameters of speed loop PI
The system's dynamic response can be faster if the proportional gain is
increased or the integral time is decreased;
If the proportional gain is too large or the integral time is too small, the
system will become overshoot and tend to oscillate;
Too small proportional gain may easily cause bad follow performance of
the system and affect stop;
P4_02 and P4_06 are filter times of motor speed detection which need
not to be adjusted, increase the values if there is current noise when
motor is running.
Function
code
Instruction Setting range【default value】 Remarks
P4_08 ACR proportional coefficient P 0~65535【2000】
Not modify
in running
P4_09 ACR integral coefficient I 0~65535【1000】
The above parameters are related to the ACR adjustment, which directly affects the dynamic
response and control accuracy if the system. In different situations, the parameters may need
proper adjustment. Incorrect parameters will cause vibration to the system.
After setting P1.16/17 to non-zero, start ACR switching function.