User manual of EC160 elevator intelligent integrated machine Function parameters
83
Function
code
Instruction Setting range【default value】 Remarks
P1_16
High-speed current loop
proportional coefficient
0~65535【0】
Not modify
in running
P1_17
High-speed current loop
integral coefficient
0~65535【0】
The parameters do not need setting usually. When the load changes, the master will show
different features at high/low speed. Then current loop shifting function can be enabled (0:
disabled) and the shifting mode is the same as speed shifting (see P4_08 and P4_09).
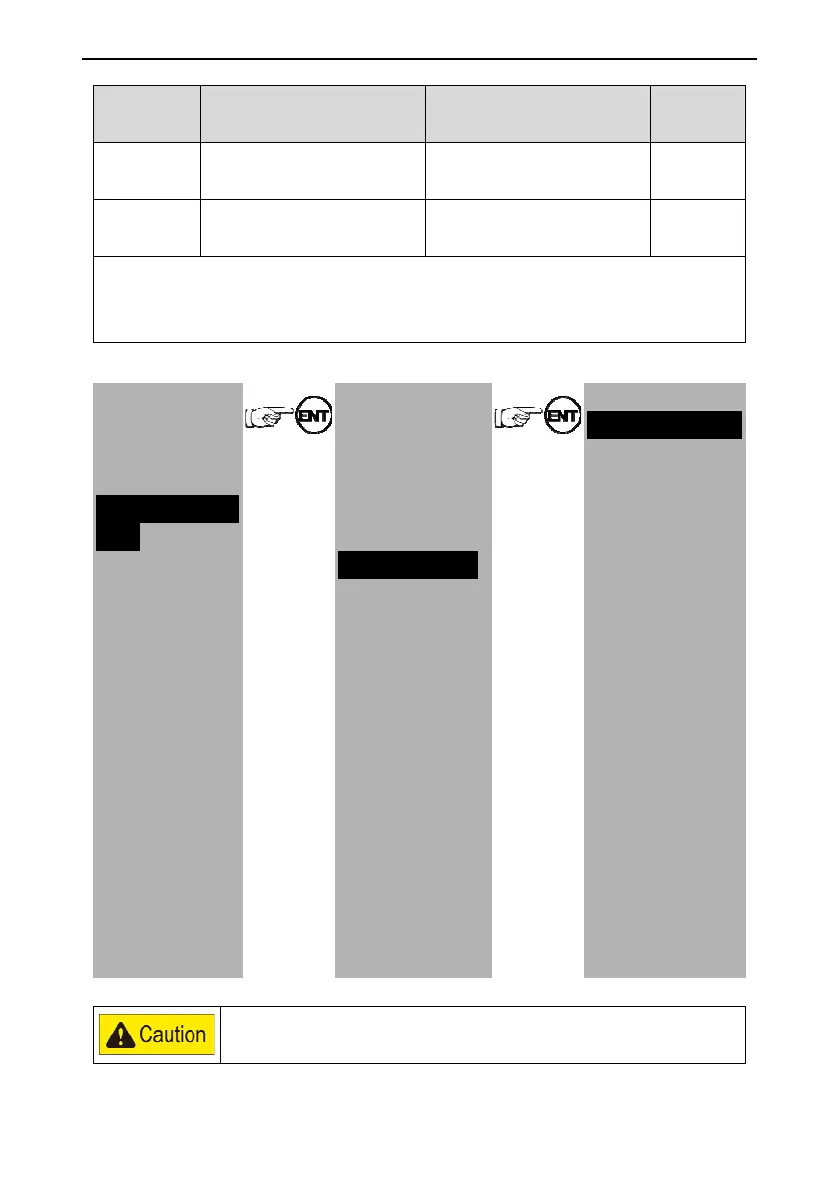
6.5.3 Parameters setting---motor parameters
【main menu】
A system control
B fault record
C language selection
D parameters setting
inquiry
E password setting
F system autotuning
G data management
H system information
【parameters setting
inquiry】
P0 master drive
control
P1 speed and
deceleration distance
P2 motor parameters
P3 encoder
parameters
P4 running
comfortability
P5 elevator protection
parameters
P6 communication
setting
P7 drive information
PE factory only
【P2 motor parameter】
00 Motor type selection
01 Rated power of the
motor
02 Rated frequency of
the motor
03 Rated speed of the
motor
04 Rated voltage of the
motor
05 Rated current of the
motor
06 Resistance of the
stator
07 Resistance of the
rotor
08 Inductance of the
stator and rotor
09 Mutual inductance
of the stator and rotor
10 Current without load
Parameters of P2 will not restore to factory values except the rated
power, rated current and rated voltage of the motor.