User manual of EC160 elevator intelligent integrated machine Function parameters
87
the encoder at high speed
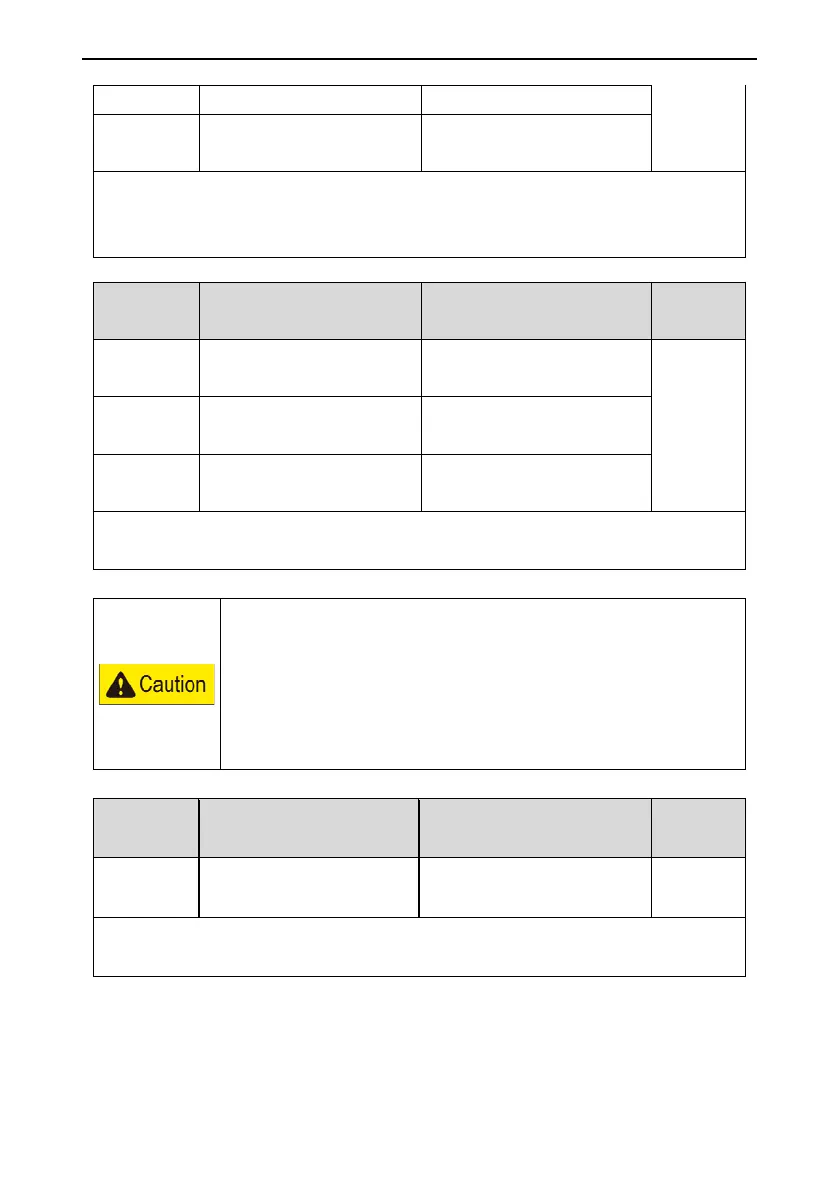
P3_05
Reverse detection time of the
encoder
0.0~10.0s【1.0】
Above parameters are the detection time of the encoder fault. Setting 0 can cancel the fault
protection. Ensure the braking is open or not when reporting the encoder fault and ensure
whether the elevator is sliding when reverse fault occurs to the encoder.
Function
code
Instruction Setting range【default value】 Remarks
P3_06
Magnetic pole position
amplitude gain
0.50~1.50【1.00】
Not modify
in running
P3_07
Magnetic pole position of C
phase
0~9999【395】
P3_08
Magnetic pole position of D
phase
0~9999【395】
The setting of above parameters is relative to the static autotuning of synchronous master and
ensures the accuracy of the static autotuning, generally, in no need of change.
The three parameters can be acquired by rotary autotuning;
The three parameters can be corrected after hoistway autotuning;
F0_19=4, inspection running for one cycle, check the magnetic pole
position of C/D phase in drive monitoring;
After power off, disconnect 1387 encoder, then power on again and
check the magnetic pole position of C/D phase in drive monitoring.
Function
code
Instruction Setting range【default value】 Remarks
P3_09
Initial position of the
magnetic pole
0.00~360.00【0.00】
Not modify
in running
This parameter will update automatically after autotuning. It is the most important parameter of
master running and can not be modified.