Goodrive18 series two-in-one VFD Function parameters and function terminal reuse
-55-
sampling of S1–S8. If the interference is strong,
increase the parameter to avoid wrong
operation.
0.000–1.000s
This function code is used to enable virtual
terminals in communication mode.
0x000–0x1FF (0: Disable, 1: Enable)
BIT0: whether to enable S1 virtual terminal
BIT1: whether to enable S2 virtual terminal
BIT2: whether to enable S3 virtual terminal
BIT3: whether to enable S4 virtual terminal
BIT4: whether to enable S5 virtual terminal
BIT5: whether to enable S6 virtual terminal
BIT6: whether to enable S7 virtual terminal
BIT7: whether to enable S8 virtual terminal
BIT8: Reserved
Note: After a virtual terminal is enabled, the
state of the terminal can be changed only in
communication mode. The communication
address is 0x200A.
Terminal control
running mode
This function code is used to set the running
mode of terminal control.
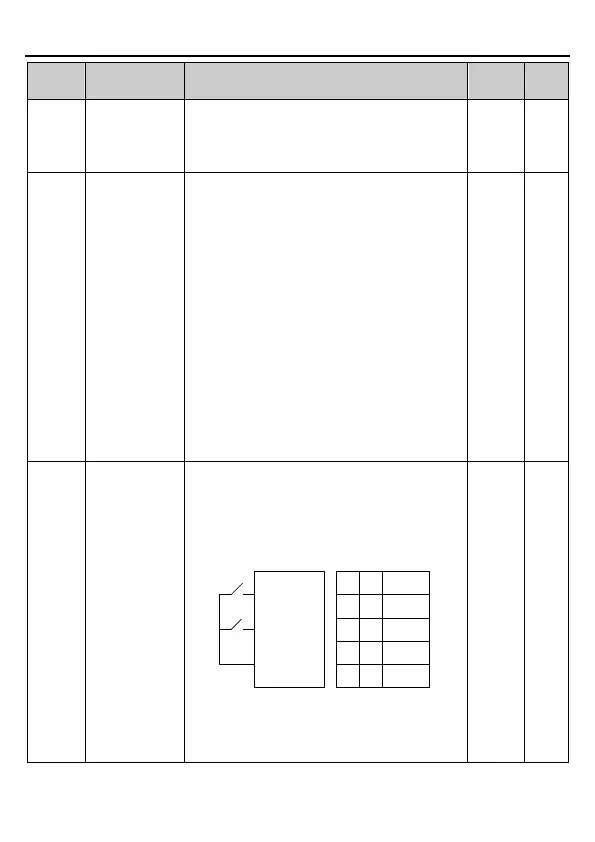
0: 2-wire control 1, the enabling consistent with
the direction. This mode is widely used. The
defined FWD/REV terminal command
determines the motor rotation direction.
FWD
REV
COM
K1
K2
Running
command
FWD REV
OFF OFF
OFF
OFF
ON
ON
ON ON
Stopping
Hold on
Forward
running
Reverse
running
1: 2-wire control 2, separating the enabling from
the direction. In this mode, FWD is the enabling
terminal. The direction depends on the defined
REV state.

 Loading...
Loading...