SV-DA200 series AC servo drives Faults and solutions
‐116‐
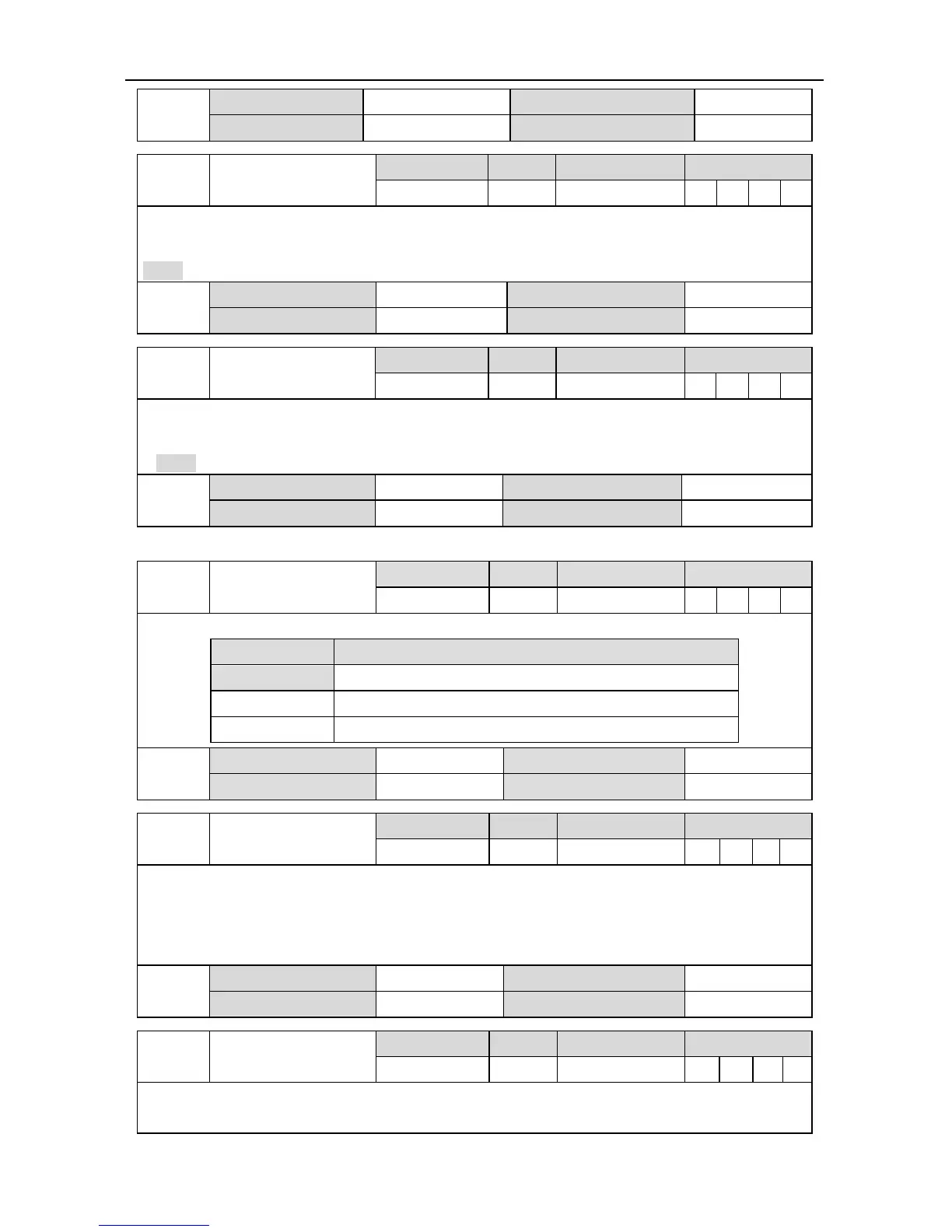
P2.32
Data size 16bit Data format DEC
Modbus address 1464,1465 CANopen address 0x2220,0x00
P2.33
Switching level of
torque control
Setting range Default Unit Available mode
0~20000 0 Based on mode T
In the torque control, if set P2.31 to 3, it is necessary to set trigger condition of gain switching.
The unit will vary with the mode and setting.
Note: Please set the degree ≥ the delay
P2.33
Data size 16bit Data format DEC
Modbus address 1466,1467 CANopen address 0x2221,0x00
P2.34
Switching delay of
torque control
Setting range Default Unit Available mode
0~20000 0 Based on mode T
In the torque control, if set P2.31 to 3, it is necessary to set switching conditions. The unit will
vary with the switching mode and setting.
Note: Please set the degree<the delay, in the actual application, the delay=the degree
P2.34
Data size 16bit Data format DEC
Modbus address 1468,1469 CANopen address 0x2222,0x00
6.3.3 Special motor control
P2.41
2
Disturbances
observer valid
Setting range Default Unit Available mode
0~2 0 - P S T F
Set whether the disturbance observer is valid or not via this parameter.
Setting value Role
[0] Invalid
1 Disturbance observation
2 Disturbance compensation
P2.41
2
Data size 16bit Data format DEC
Modbus address 1482, 1483 CANopen address 0x2229, 0x00
P2.42
Disturbance observer
compensation gain
Setting range Default Unit Available mode
0~100 0.0 % P S F
This parameter is used to set the compensation gain of disturbance torque. Increasing the gain
may improve the effect of suppressing disturbance impact but the noise may enhanced; it is
necessary to use with P2.43 to find the best setting point. After setting P2.43, please increase the
set value of P2.42.
P2.42
Data size 16bit Data format DEC
Modbus address 1484,1485 CANopen address 0x222A,0x00
P2.43
Disturbance observer
cut-off frequency
Setting range Default Unit Available mode
0~3000 200 Hz P S F
This parameter is used to set the cut-off frequency of disturbance observer. Decreasing the set
value can downgrade the noise; while increase the set value can reduce the delay of disturbance
 Loading...
Loading...
