Posi- and synchronous operating
© KEB, 2012-10 COMBIVERT F5-A, -E, -H Page 7.12 - 63
7
are always dened for clockwise rotation, and for the start only a reference marker for counter clockwise rota-
tion. The values for the other reference markers are set to zero (= deactivated)
The prole speed denition is given via parameter PS.31 "max. speed %". That means value „16: PS.31 /
PS.25“ must be entered in PS.00 / bit 5 "positioning / target speed".
The drive shall stop at the target, value 0 must be entered for all blocks in parameter PS.25 "index / speed".
This is a single positioning, PS.26 „index/ next“ must always be set to „-1: PS.28“, since there is no next po-
sition. The positions are preset as absolute values and "continuation of the prole processing" is deactivated.
Therefore parameter PS.27 must be set to value 0.
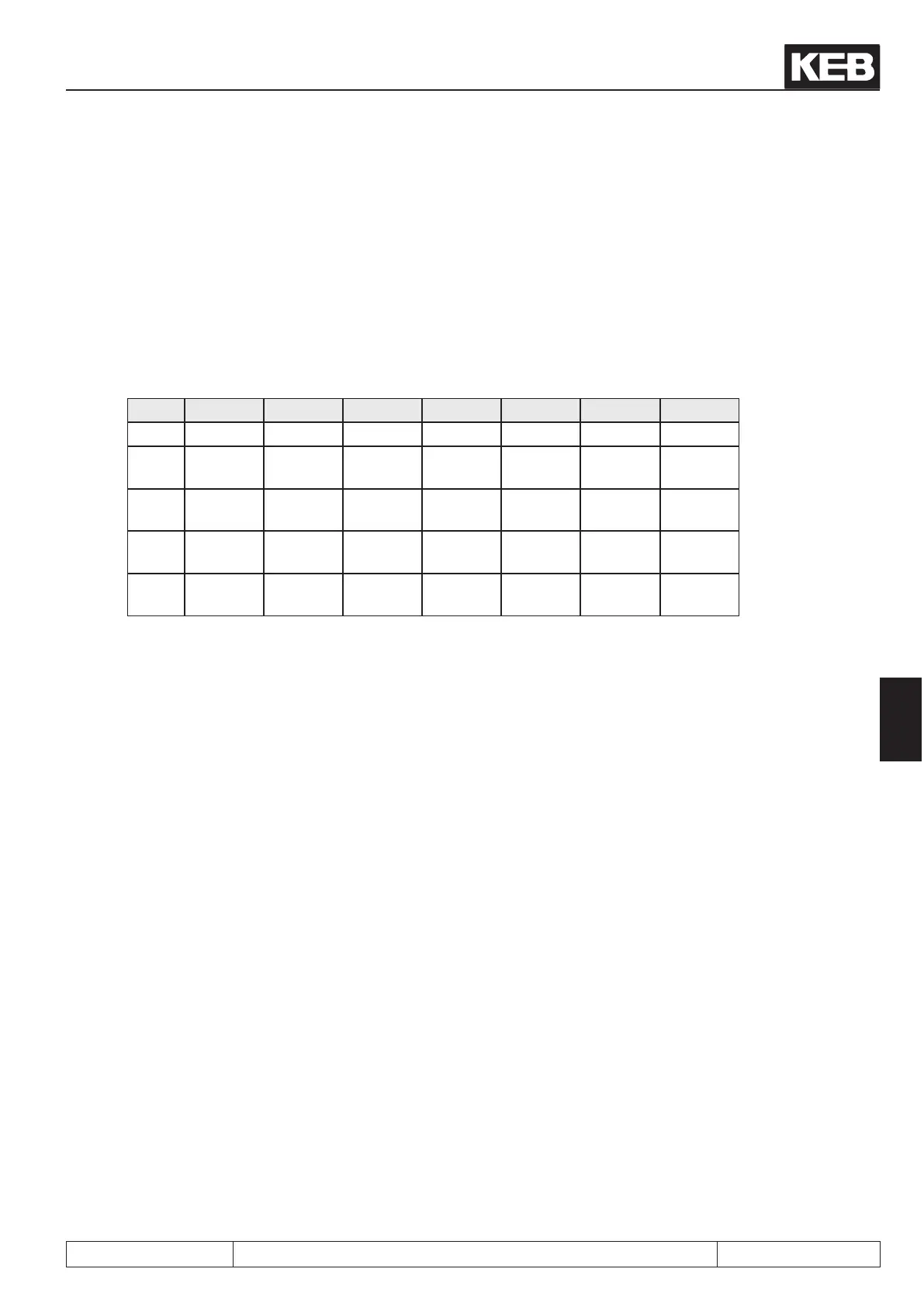
This results in the following positioning blocks:
PS.23 PS.24 PS.25 PS.26 PS.27 PS.46 PS.47
Start 0 0 0 -1: PS.28 0 0: off 1000
Tar-
get 1
1 5500 0 -1: PS.28 0 1000 0: off
Tar-
get 2
2 6250 0 -1: PS.28 0 1750 0: off
Tar-
get 3
3 7000 0 -1: PS.28 0 2500 0: off
Tar-
get 4
4 8000 0 -1: PS.28 0 3500 0: off
If the drive shall now travel from the start to target 2, value 2 must be entered in parameter PS.28 "start index
new prol", and the "start positioning" command must be given then.
In the process, the undercarriage also crosses reference marker 1, which can trigger an adjustment only during
the positioning to the starting point. For the drive to target 2, marker 1 must be ignored. For that purpose, the
parameter PS.40 "reference point window" is used. Only an initiator pulse within the position window of +/-
PS.40 around the programmed value for the reference marker triggers an adjustment.
Example target 2:
PS.46 = 1750 increments / PS.24 = 6250 → the reference marker is expected at 6250 – 1750 = 4500.
If the reference point window is set to, e.g., 300 increments, the initiator signal is accepted only if the drive
rotates in clockwise direction of rotation and as long as the actual position ru.54 is in the range of 4200 to 4800
increments.
The size of the reference point window depends on the maximum expected slip. If one assumes, that maximally
150 increments „are lost“ due to the slipping of the wheels (i.e. are not converted to propulsion), a value > 150
increments must be adjusted in PS.40.
If the drive is approaching target 2 from the left, reference marker 1 generates a positive edge at an actual po-
sition of 700...850 (depending on the level of slippage) and therefore outside of the permitted window.
This marker is therefore ignored. Reference marker 2 generates its pulse within the reference window and is
evaluated for the adjustment.
Example start position:
To drive back to the starting position, value 0 must be entered in parameter PS.28 "start index new prol" and
the "start positioning" command must be given then. The drive then travels back to the start with direction of
rotation counter clockwise.
PS.47 = 1000 increments / PS.24 = 0 → the reference marker is expected at 0 + 1000 = 1000,
 Loading...
Loading...


