6
6
11 15
KEB COMBIVERT F5-M / S
Name: Basis
06.05.04
Section PageDate
© KEB Antriebstechnik, 2002
All Rights reserved
Chapter
Functional DesriptionPositioning and Synchronous Control
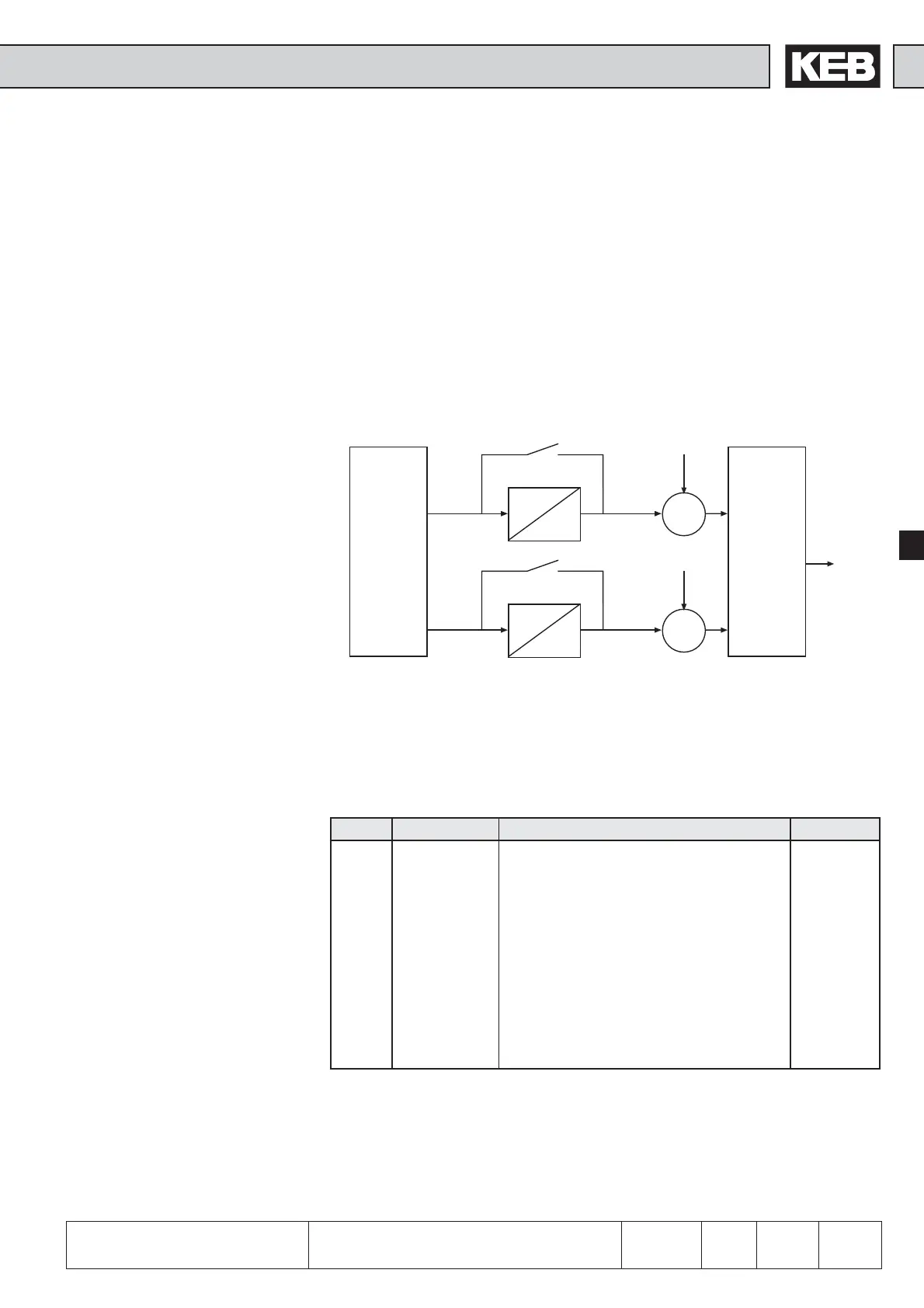
The position of S! and S2 in the graphic below, is dependent on the parameters
cS.1, PS.1, PS.0, ec.39.
Basically applies:
-speed-controlled open, but feedback always with gear factor = 1
-Posi S1,S2 open
-Posi over output S2 closed, gear factor for the speed precontrol
-Synchronous Mode S2 closed
-ec.39 =1 , S1 closed, gear factor enters into the speed detection
The summing-up of the basic
setting
ec.4
ec.5
-
S1
ec.33
ec.31
ec.29
ec.14
ec.15
-
S2
ec.34
ec.32
ec.30
ru.54
Position detection
Evaluation
Gear factor
Gear factor
Bit -No. Decimal value Input Terminal
0 1 ST (prog. input Ñcontrol release / resetì) X2A.16
1 2 RST (prog. input Ñresetì) X2A.17
2 4 F (prog. input Ñforwardì) X2A.14
3 8 R (prog. input Ñreverseì) X2A.15
4 16 I1 (prog. input 1) X2A.10
5 32 I2 (prog. input 2) X2A.11
6 64 I3 (prog. input 3) X2A.12
7 128 I4 (prog. input 4) X2A.13
8 256 IA (internal input A) none
9 512 IB (internal input B) none
10 1024 IC (internal input C) none
11 2048 ID (internal input D) none
Posi/Synch input select (PS.2) If the Posi Mode is selected with PS.0, the posi-module can be activated by setting
the input defined with PS.2.

 Loading...
Loading...







