6
12 9
KEB COMBIVERT F5
Name: Basis
6
04.05.04
Section PageDate
© KEB Antriebstechnik, 2002
All rights reserved
Chapter
Functional DescriptionTechnology Control
AN1
AN2
cn.0 = 0
cn.0 = 2
ru.27
ru.29
ru.28
ru.30
cn.4...6
cn.10
ru.52
oP.0=0
+
-
ru.2
cn.1
%
V
%
V
ru.1
+
+
cS.0 = 1
cn.7/8 cS.4
%
Hz
cn.14
ru.2
ru.17
cn.2 = 5
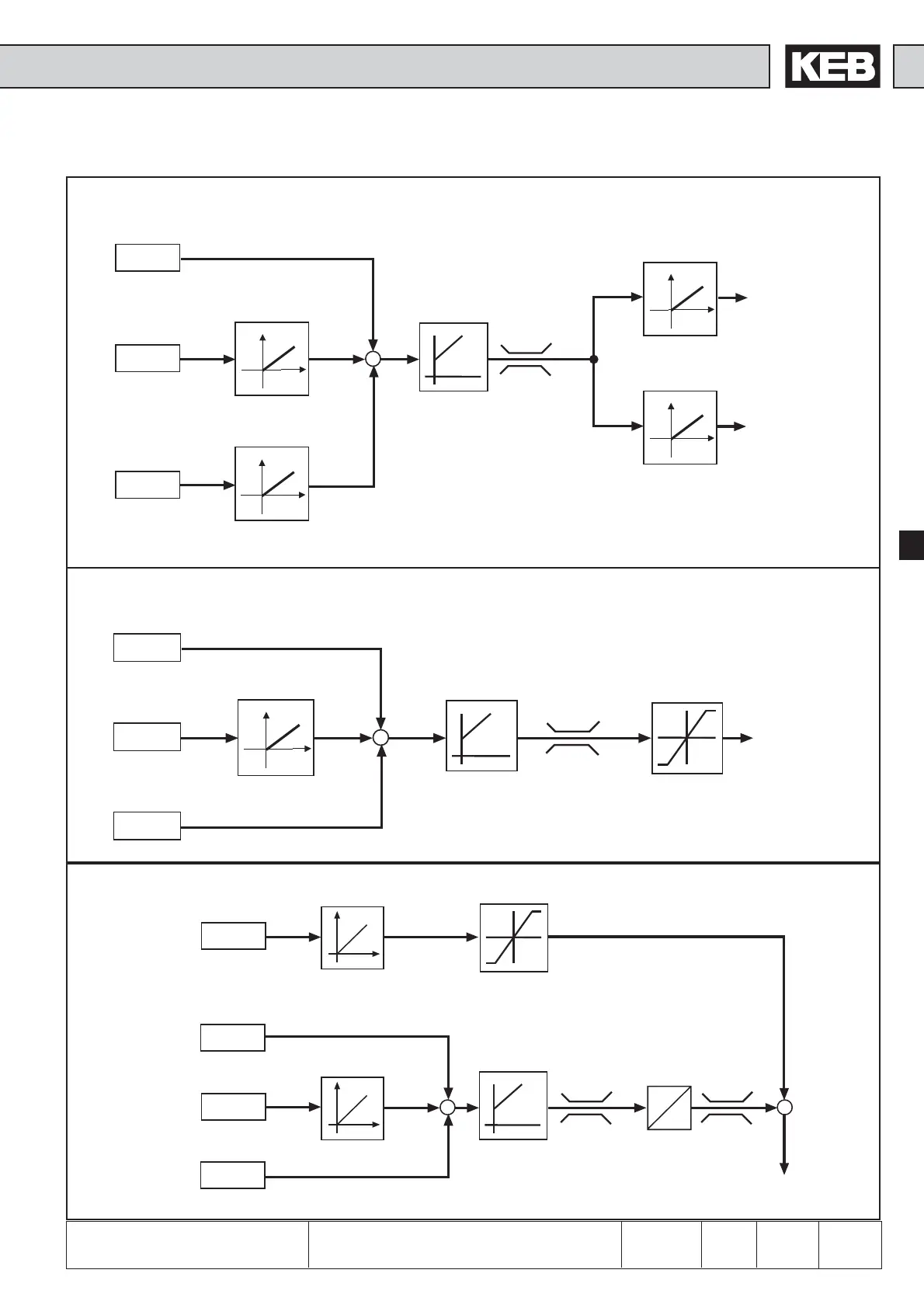
PID-Controller as active current- (torque-) regulation without precontrol
cn.1
AN1
AN2
cn.0 = 1
cn.2 = 1
ru.27
ru.29
ru.28
ru.30
cn.4...6
cn.10
cn.7/8
ru.52
+
-
ru.34
%
V
%
V
%
V
%
V
ru.36
ANOUT1
ANOUT2
An.31=9/10
An.31=9/10
ru.33
ru.35
PID-Controller on the analog output
Dig. set value
Ana. set value
Actual value
Characteristic
amplifier
PID controller
Characteristic
amplifier
An-parameter
Characteristic
amplifier
Characteristic
amplifier
cn.1
AN1
ru.17
cn.0 = 1
cn.2 = 5
ru.27 ru.28
cn.4...6
cn.10
cn.7/8
ru.1
ru.52
oP.0=6
+
-
ru.2
%
V
Characteristic
amplifier
Speed
pre-control
Analog current
set value
Active current
real value
PID controller
Ramp generator
oP.0 = 6 (externer PID Ausgang ru.52)
An-parameter
PID-Controller as active current- (torque-) regulation without precontrol
Characteristic
amplifier
Speed
pre-control
Analog current
set value
Active current
real value
PID controller
Ramp generator
An-parameter
Digital current
set value
Characteristic
amplifier

 Loading...
Loading...







