6
11
KEB COMBIVERT F5-M / S14
Name: Basis
06.05.04
Chapter Section Page Date
© KEB Antriebstechnik, 2002
All Rights reserved
Functional Desription Positioning and Synchronous Control
**
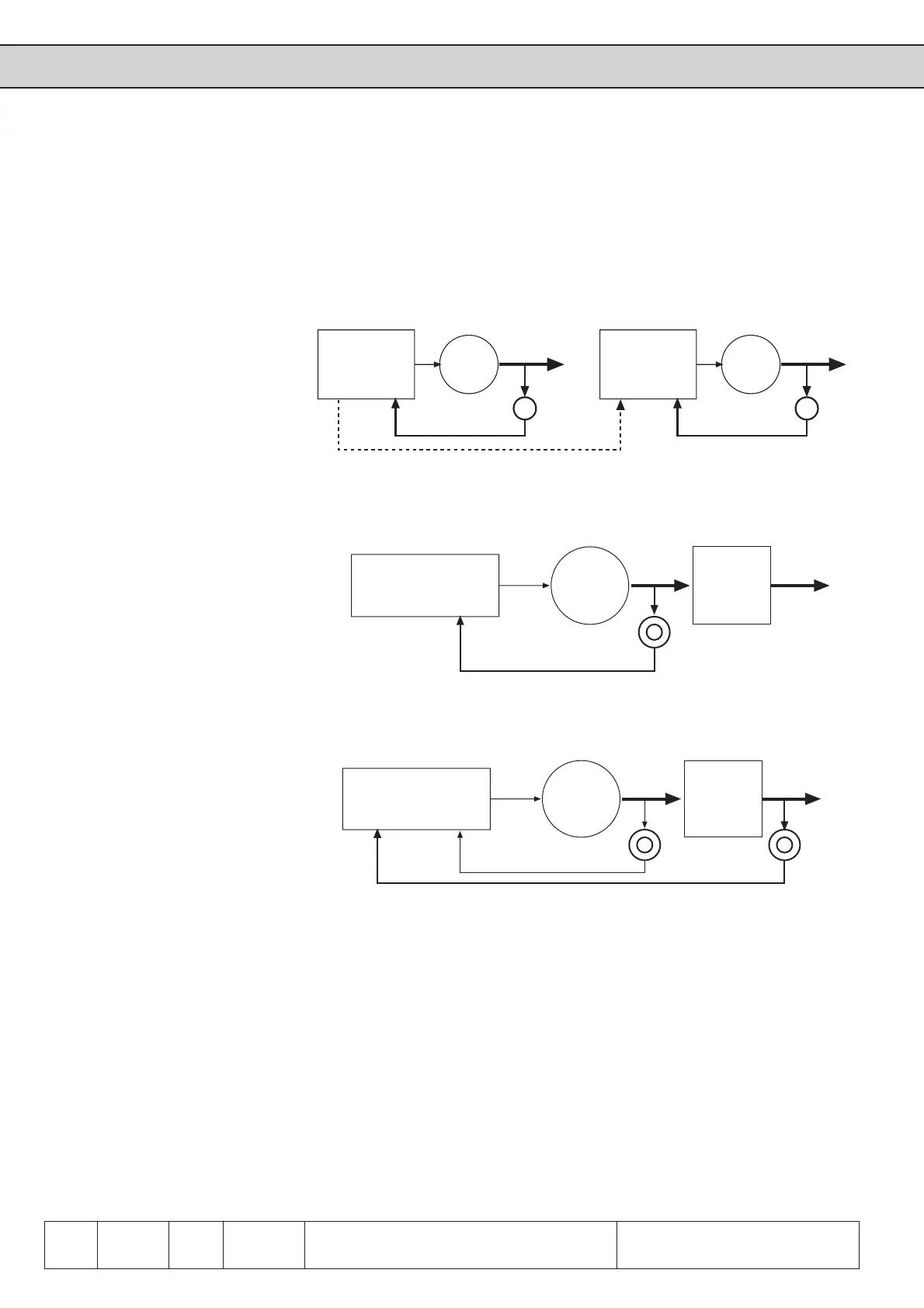
Controller
Motor
Gearbox
CH 2 CH 1
*
Controller
Motor
Gearbox
CH 2 CH 1
Sychron - Mode: cS.1 = ch1, PS.1 = ch2
Posi - Mode: cS.1 = ch1, PS.1 = ch1
A gear factor between Master and Slave drive would have to be adjusted in ch2
under parameter ec.14/15. The line number of the master is rescaled to the line
number of the slave.
Synchronous and positioning
Controller
Motor
CH 2 CH 1
Controller
Motor
CH 2 CH 1
Position reference
Encoder Encoder
Positioning to feedback
cS.1 = PS.1
Encoder
Positioning to output
Position reference
Position reference
The speed settings refer in both cases to the controller, thus in front of the gearbox.
cS.1 =/ PS.1
Positioning to output without
feedback
Positioning not possible in controlled operation.
ï although a controlled operation could be adjusted for this constellation too,
the gear backlash would lead to inevitable oscillations.
 Loading...
Loading...










