A
A
C
C
S
S
6
6
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 34 Website: www.leadshine.com
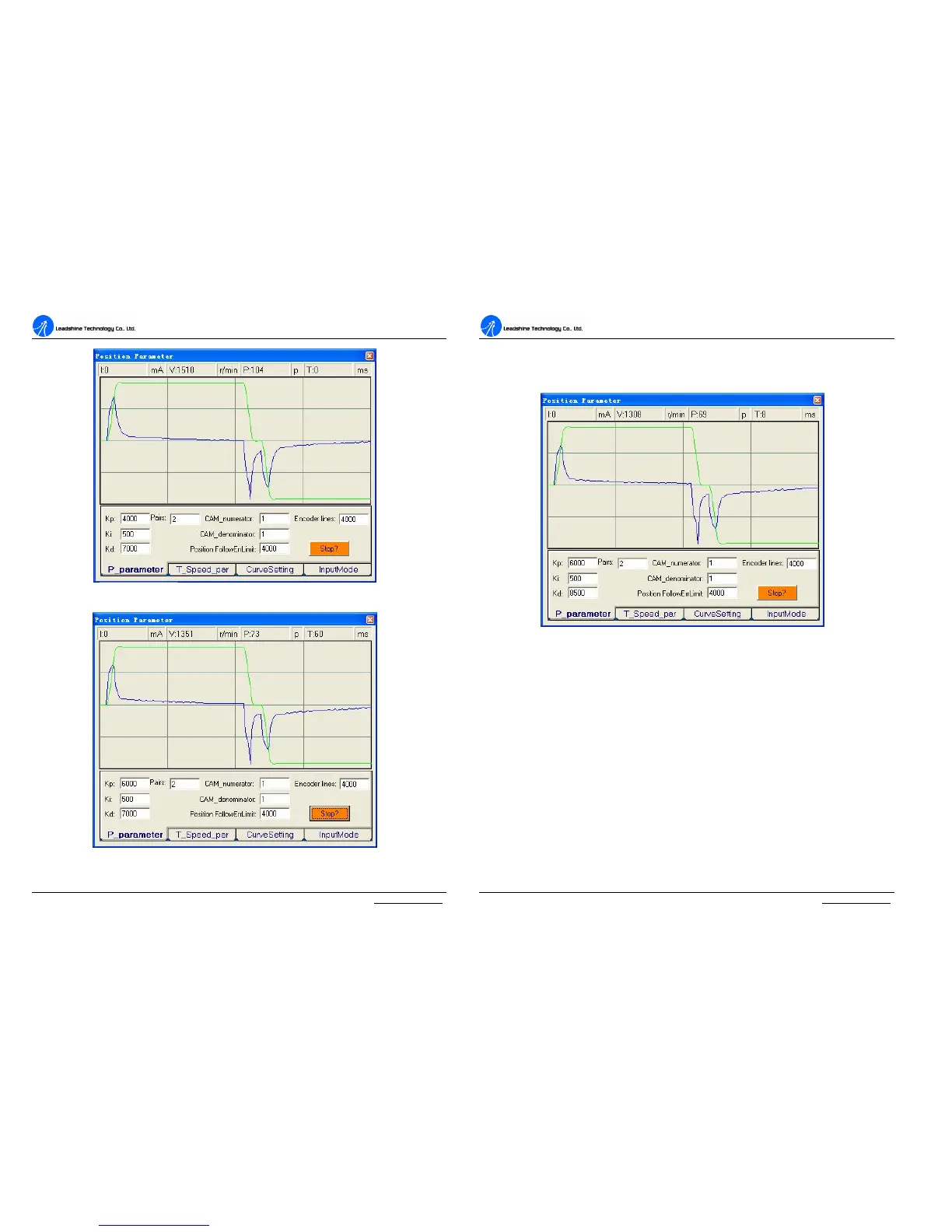
Figure 37: Position following error curve and velocity curve (Kp=4000, Ki=500 and Kd=7000)
Figure 38: Position following error curve and velocity curve (Kp=6000, Ki=500 and Kd=7000)
A
A
C
C
S
S
6
6
0
0
6
6
D
D
i
i
g
g
i
i
t
t
a
a
l
l
A
A
C
C
S
S
e
e
r
r
v
v
o
o
d
d
r
r
i
i
v
v
e
e
M
M
a
a
n
n
u
u
a
a
l
l
R
R
e
e
v
v
1
1
.
.
0
0
Tel: (86)755-26434369 35 Website: www.leadshine.com
Increase Kd can reduce velocity overshoot, and get a better velocity curve in as
shown in Figure 39.
Figure 39: Position following error curve and velocity curve (Kp=6000, Ki=500 and Kd=8500)
Since position following error is still large during constant speed period in Figure 39,
we try to increase Ki to improve system’s performances. Figure 40, Figure 41, and
Figure 42 show the result after increasing Ki. From Figure 42, we can see that too
much Ki will cause position curve over shoot.