Lite-On Technology Corp.
Industrial Automation
173
Principle of time domain
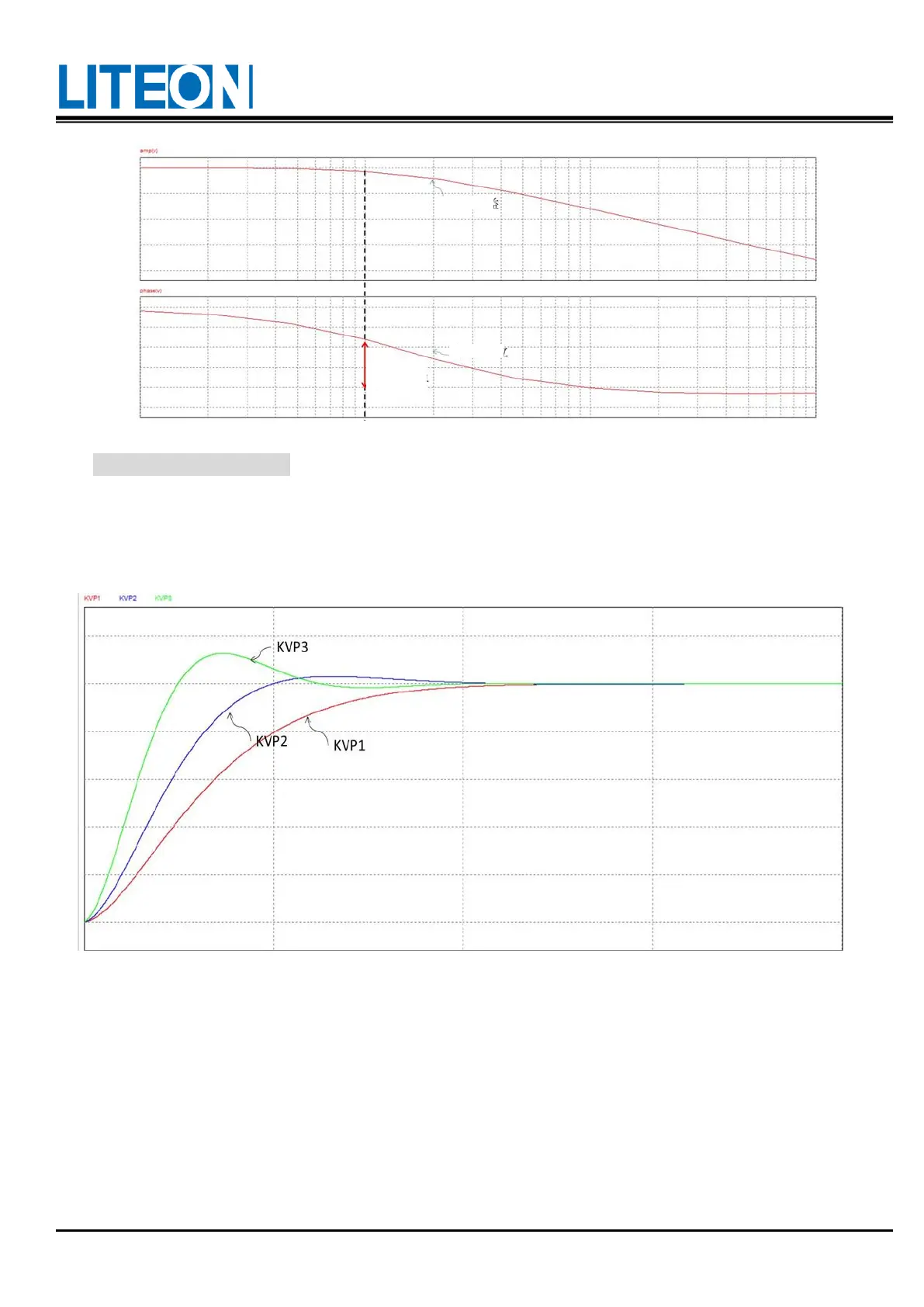
1. The higher the KVP is, the broader the bandwidth and the shorter time required for rising. If the
KVP is too high, the phase margin of the system is low and the relevant stability would also be
low. For fixing the steady-state following error, this is not more evidently helpful than the KVI.
Refer to the following illustration (KVP3>KVP2>KVP1).
2. The higher the KVI is, the faster the steady-state error can be eliminated. It is obviously helpful
for the steady-state error of KVI. If the KVI is too high, the phase margin of system would be too
low. Refer to the following diagram (KVI3> KVI 2> KVI 1).
Phase margin
of 45 degrees
 Loading...
Loading...