Lite-On Technology Corp.
Industrial Automation
174
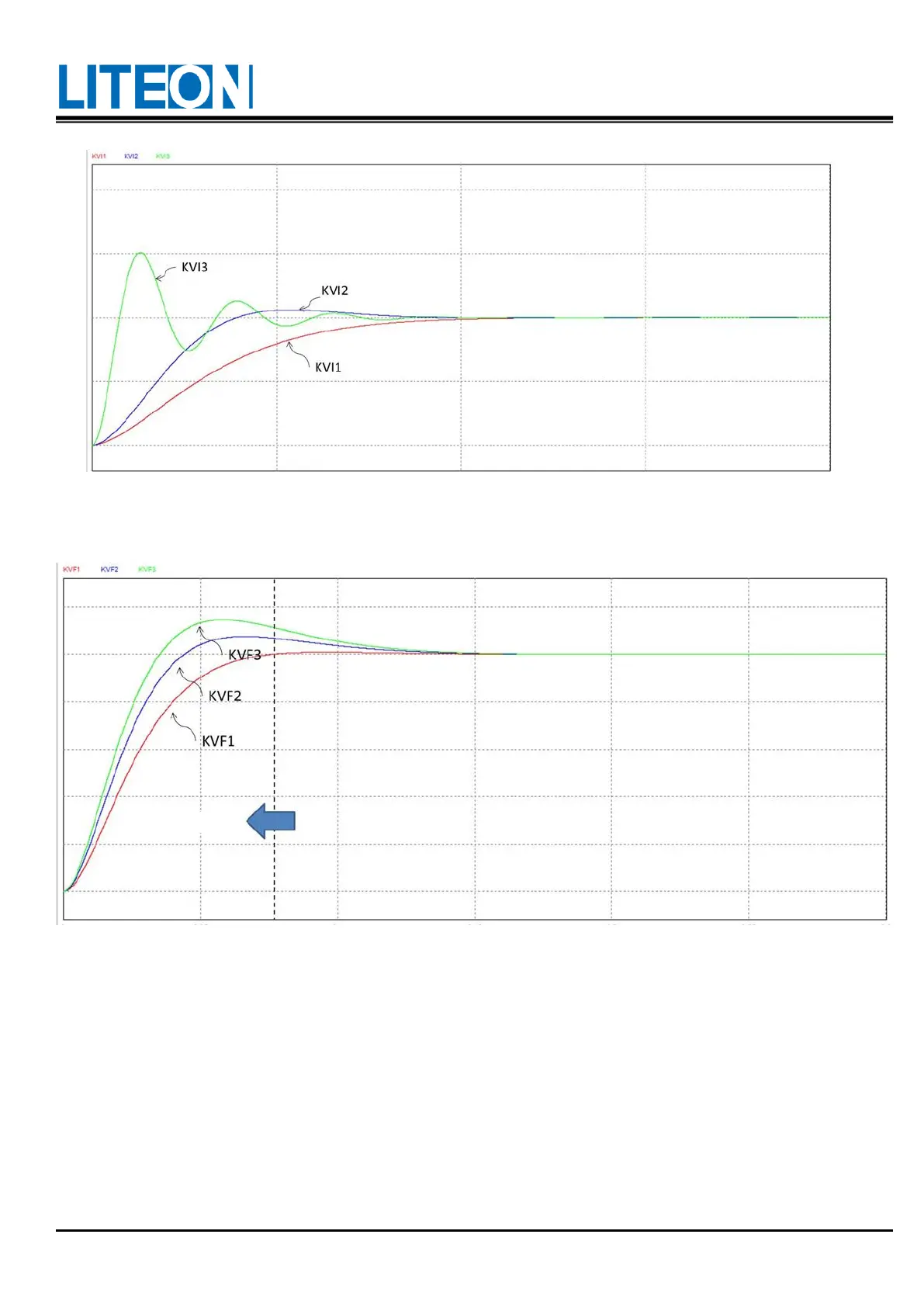
3. The higher the KVF is, the higher the feed-forward compensation. The dynamic following error
during the transient state can be reduced. If the KVF is too high, it may result in system swing.
Refer to the diagram below (KVF3>KVF2>KVF1).
Generally the measurement requires the use of instrument if the frequency domain method is used. The
user must have the relevant measurement equipment at hand. The time domain method only requires
one oscilloscope. By using the analog input and output terminals provided by the drive in the
meantime, the user can utilize the time domain method conveniently to adjust the parameter of PI
controller.
Auto mode
The self-adaptive learning rule is used for the automatic gain adjustment. The internal parameter of the
control unit is adapted automatically to the variation in external load inertia. Certain convergence time
is required for adaptive learning. If the load changes too fast, it is not applicable to the auto mode. It is
 Loading...
Loading...