Lite-On Technology Corp.
Industrial Automation
208
Chapter 10 Specifications
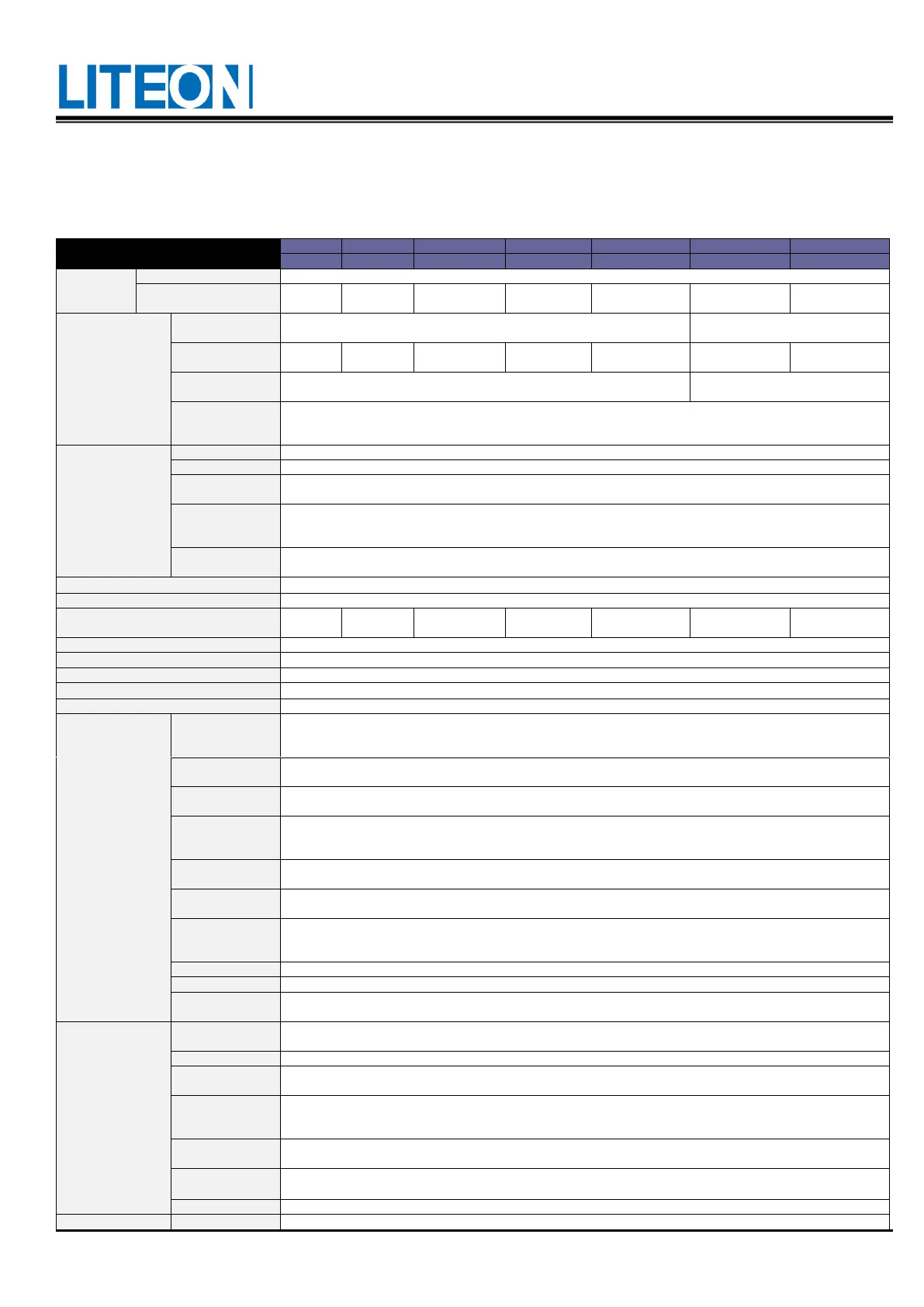
10.1. Standard specification for the servo drive
Model name of servo drive: ISA-7
Rated current [A] (Note
1)
Power supply input
of the main circuit
Three phase AC 200 ~ 230V/50, 60Hz
Single phase AC 230V/50, 60Hz
Three phase 200VAC-230VAC,
50/60Hz
Rated current [A]
(Note 1)
Allowable voltage
variation
Three phase: 170 ~ 255 VAC
Single phase: 200 ~ 255 VAC
Three phase: 170 ~ 255 VAC
Allowable
frequency
variation
Power supply input
of the control
circuit
Single phase 200VAC-240VAC, 50/60Hz
Allowable voltage
variation
Single phase 170VAC-255VAC
Allowable
frequency
variation
Power supply for interface
24VDC 10% (required current capacity: 0.5A)
Method for control of main circuit
Space-vector PWM control/current control method
Built-in regenerative resistor
Allowable regenerative power [W]
Compatible (A/B/Z-phase pulse)
Two channels are available. Use the parameter to set the monitoring signal (range of output voltage: 8V).
Pulse frequency
of maximum
output
500k/4Mpulses/s (if the differential receiver is used) and 200kpulse/s (if the open collector is used)
Pulse +symbol; A phase + B phase; CCW pulse + CW pulse
Low-pass and P-curve smoothing filter
Encoder resolution: 20 bits
A/B rate of electronic gear, A: 1-16777215, B: 1-16777215, 1/10 < A/B < 4000
Width setting for
positioning
completion
0-65535 pulses (command pulse unit)
Via the parameter or external analog input (0- +10 VDC/maximum torque)
Feed-forward
compensation
Analog speed command 1:2000, internal speed command 1:5000
Control of external analog command/control of internal register
Low-pass smoothing filter; S-curve smoothing filter
Input of analog
speed command
0- 10VDC/rated speed (may be changed via the parameter at 10V speed) (Input resistance: 10kΩ-12 kΩ)
Maximum 0.01% (load variation ratio: 0-100%), 0% (power variation ratio: 10%)
Maximum 0.2% (ambient temperature: 25°C 10°C); then the analog speed command is used
Via the parameter or external analog input (0- +10 VDC/maximum torque)
Control of external analog command
 Loading...
Loading...