Lite-On Technology Corp.
Industrial Automation
231
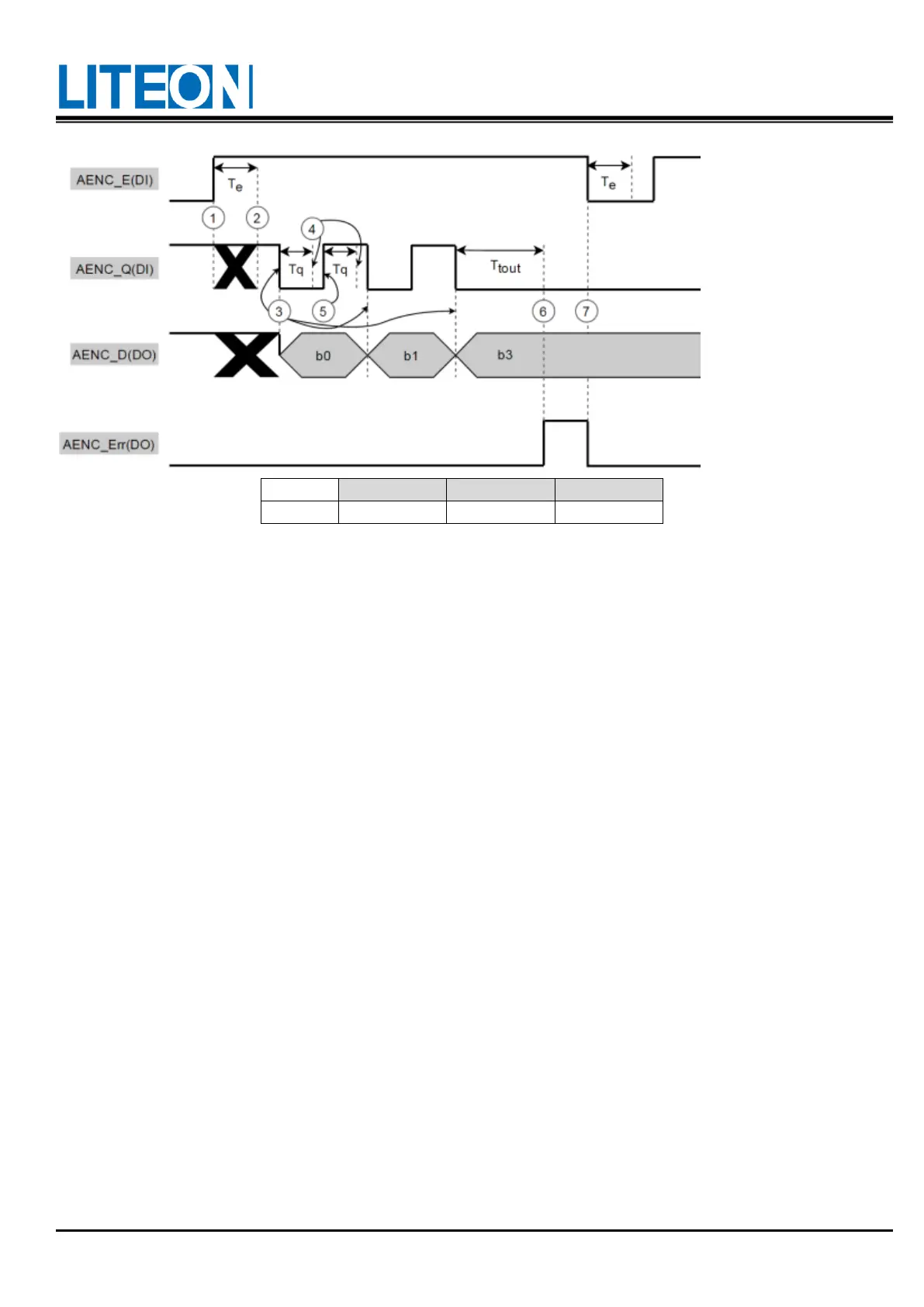
Timing description:
① When starting handshake, host controller enable AENC_E signal.
② After delay T
e
, data handshake start.
③ When AENC_Q switch from ON to OFF, servo output AENC_D as absolute position data bit(n)(n is
0,1,2,3… 79).
④ After delay T
q
, host controller can read data from AENC_D.
⑤ After reading AENC_D, host controller switch AENC_Q to ON again, and delay T
q
for next bit data.
Repeating step ③ to ⑤ until all the data(bit0 ~ bit79) transmitted.
⑥ If AENC_Q switched from ON to OFF, and hold for T
OUT
, alarm AENC_ERR occurs and handshaking
stopped.
If AENC_ERR occurred, host controller need to reset AENC_E to OFF to clear AENC_ERR, then set to ON
to restart data transmission.
11.3.7. Read absolute position by communication
Absolute position can be accessed by following parameters:
PD-61 Absolute encoder position- pulses in a round or PUU.
PD-60 Absolute encoder position- numbers of turns.
By setting PD-57 bit1, the value can be set pulse or PUU.
 Loading...
Loading...