Lite-On Technology Corp.
Industrial Automation
38
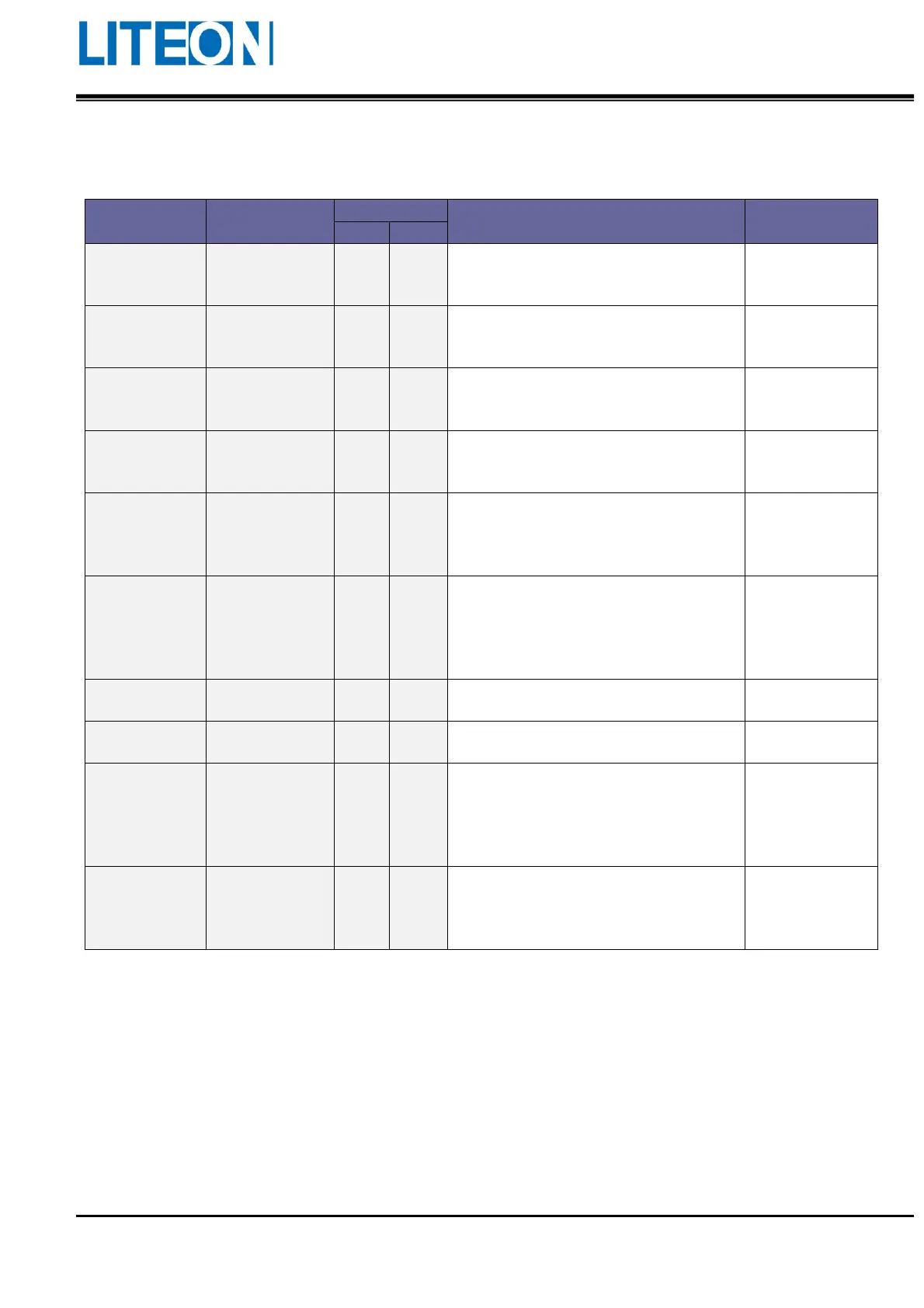
The user selects the operating mode based on his or her own need and refers to the DI/DO table to find
out the default DI/DO signal in the selected mode and the Pin No of the signal for wiring. The
following table lists the default DI/DO signal function and pin number:
Description for the default DO signal
After the drive is electrified, this input is ON
if there is no alarm (ALRM) for the control
circuit and motor power circuit.
If the input SVON is ON, this input is ON
after it is confirmed that the motor servo
circuit operates smoothly.
If the rotation speed of the motor is less than
the setting value of the parameter (PC-20),
this input is ON.
If the actual rotation speed (r/min) of the
motor exceeds the setting value of the
parameter (PD-43), this input is ON.
If the error (PULSE) between the motor
command and the actual position is less than
the setting value of the parameter (PA-20),
this input is ON.
An alarm occurs for the servo drive. (The
WARN is input when the positive and
negative limits, emergency stop,
communication abnormality and low voltage
occur.)
The control contact of the electromagnetic
brake
When the overload level setting is reached,
the input is ON.
Warning output of the servo drive
The warning output is generated when the
positive and negative limits, emergency stop,
communication abnormality and low voltage
occur.
If the error value between the speed
command and motor feedback speed is
below the setting value of the parameter
(PC-23), this input is ON.
 Loading...
Loading...