Lite-On Technology Corp.
Industrial Automation
39
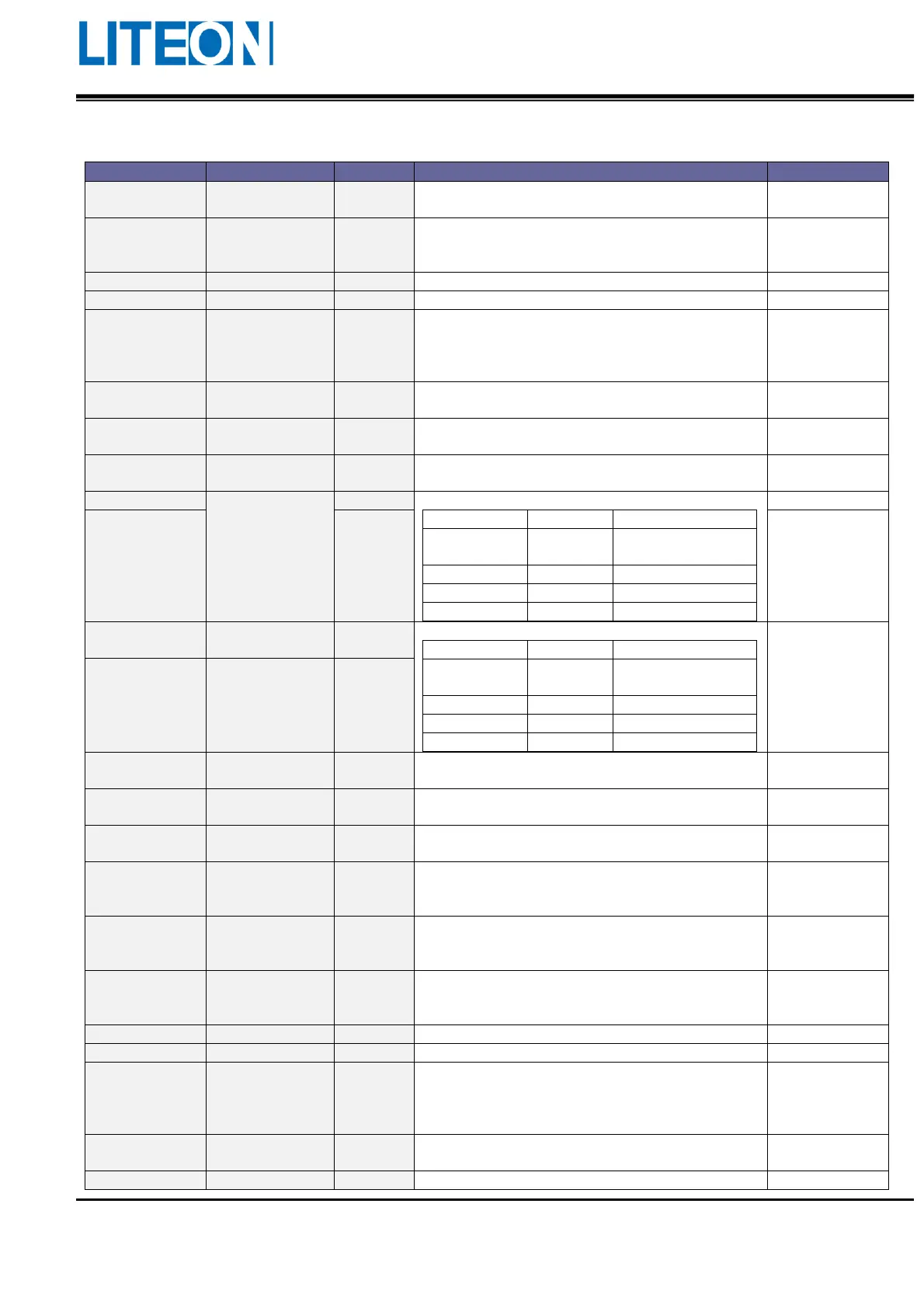
The following describes the default DI signal.
If the mode is ON, the servo circuit is activated and
the motor coil is excited.
After the alarm (ALRM) occurs, this signal is used to
reset the drive to output the Ready (SRDY) signal
again.
It is used to switch the controller gain.
It is used to clear the error counter.
If this signal is ON and the motor speed is below the
setting value of the parameter PC-20, the position of
the motor is locked to the one that the signal is
generated instantly.
If this signal is ON, the direction that the motor
moves to is reversed.
ON indicates that the torque limiting command is
effective.
ON indicates that the speed limiting command is
effective.
The source of the speed command is selected:
The S mode is the
analog input;
The source of the torque command is selected:
The T mode is the
analog input;
It is used for switching of the mixed mode. OFF:
Speed; ON: Position
It is used for switching of the mixed mode. OFF:
Speed; ON: Torque
It is used for switching of the mixed mode. OFF:
Torque; ON: Position
B contact is used. This mode must be conducted
(ON) often, otherwise the drive shows an alarm
(ALRM).
This mode indicates the CCW-limit. B contact is
used. This mode must be conducted (ON) often,
otherwise the drive shows an alarm (ALRM).
This mode indicates the CW-limit. B contact is used.
This mode must be conducted (ON) often, otherwise
the drive shows an alarm (ALRM).
It indicates the reverse torque limit.
It indicates the forward torque limit.
It allows the selection of the jog function for external
terminals.
This signal must be connected to use the jog function
for external terminals.
When the signal is connected, the motor moving
forward changes to inching rotation.
When the signal is connected, the motor moving in
 Loading...
Loading...