Quattro DC Interconnections
28
For more on the multiplier gain or bias
parameters, see Drive A1 submenu on page 41.
The scaling of the analog input signals, with
BIAS set to 0.00 and MULT set to 1.0 follows:
Speed Command
+10VDC = positive contract speed
-10VDC = negative contract speed
Pre Torque Command
+10VDC = positive rated pre-torque of motor
-10VDC =
negative rated pre-torque of motor
Torque Command
+10VDC = positive rated torque of motor
-10VDC =
negative rated torque of motor
NOTE: The drive cannot recognize voltages
outside of the 10VDC on its analog input
channels.
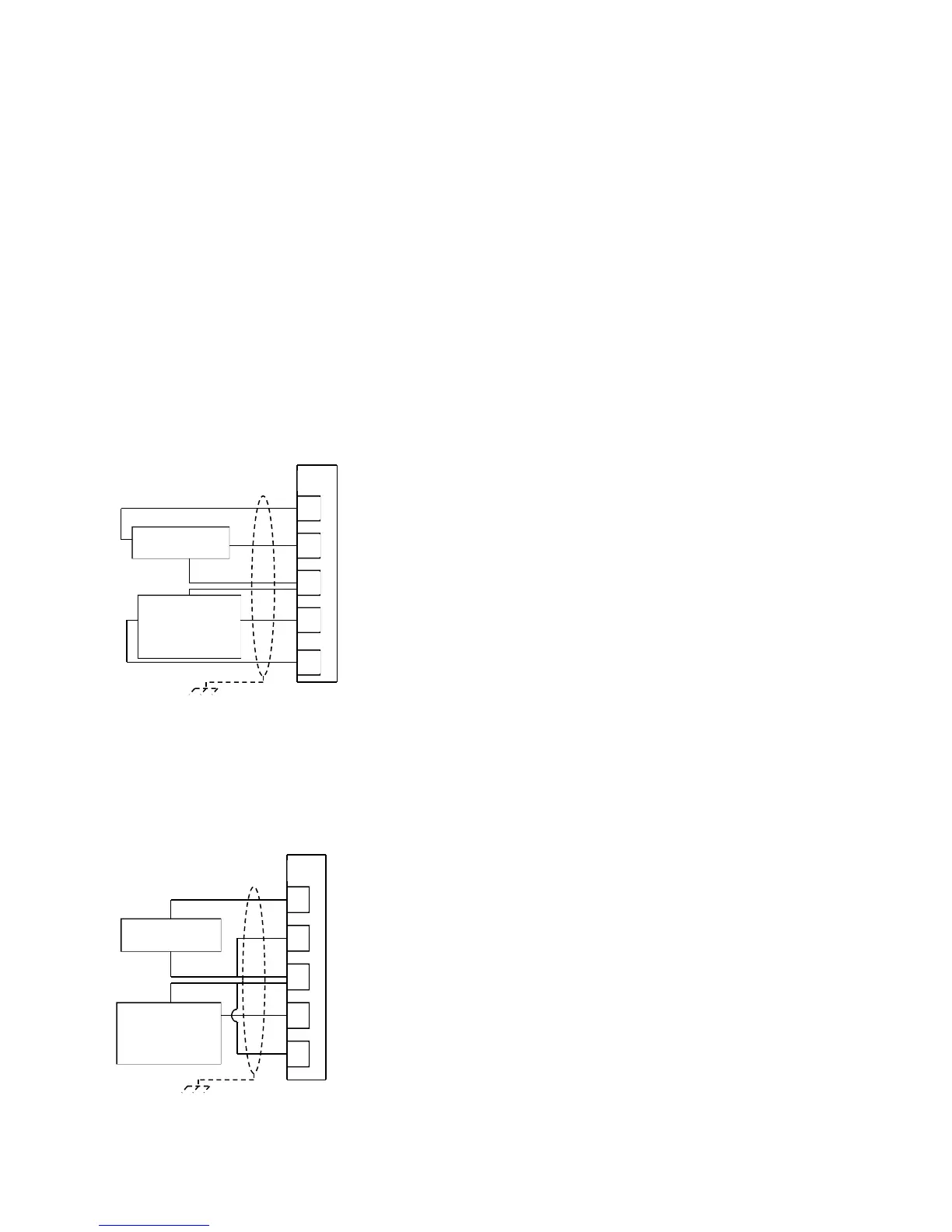
The Quattro DC provides common mode noise
rejection with the differential analog inputs. The
connection of these two differential inputs is
shown in Figure 9.
Figure 9: Analog Inputs (Differential)
Figure 10 shows the connection for the analog
inputs if they are configured for single-ended
connection. In this configuration, the Quattro
DC noise immunity circuitry is not in effect.
Note: For prevention of ground noise
interference, a twisted shielded pair must be run
to the source and not connected at the board.
Figure 10: Analog Inputs (Single Ended)
PreTorque
Cmd, ±10V
or Torque
Command, ±10V
15
16
18
19
17
analog input 1+
analog input 1-
analog input 2+
analog input 2-
analog input common
TB1
Speed Cmd
±10V
19
PreTorque
Cmd, ±10V
or Torque
Command, ±10V
15
16
18
17
analog input 1+
analog input 1-
analog input 2+
analog input 2-
analog input common
TB1
Speed Cmd
±10V