111
P01.25~P01.28 are used to display the percentage of the process closed loop reference, feedback, error
and output in Group P14 relative to the full range.
The estimated temperature of motor indicates the motor temperature estimated. Temperature display
range: 0~150
℃; precision: 5%.
Corresponding value of the torque reference command.
Indicating the input pulse frequency of terminal X6.
6.3 Basic parameters (Group P02)
P02: Basic parameters
The group of basic parameters are mainly used to the basic parameters that are necessary for the drive
operation, such as control mode, main/auxiliary frequency reference and calculation,
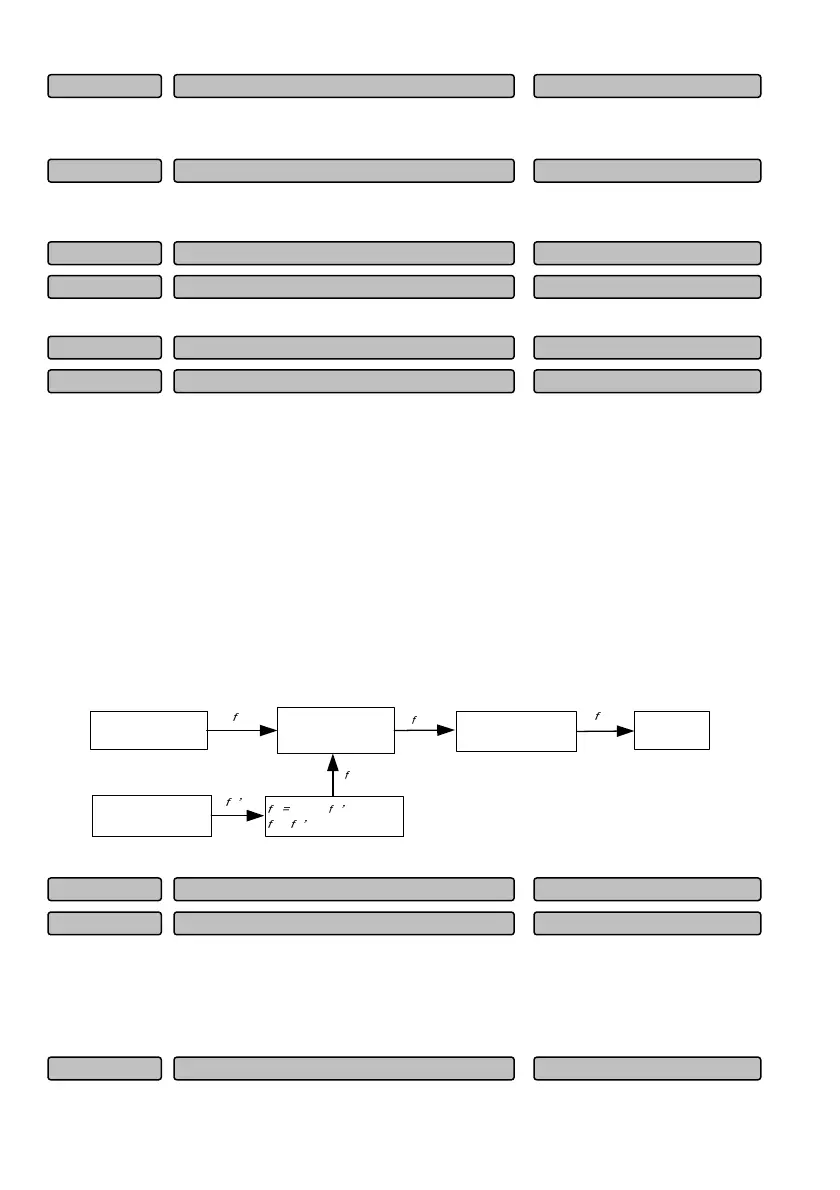
acceleration/deceleration time, etc. The set frequency of the MV200 drive can be combined by the main
set frequency and the auxiliary set frequency. P02.04~P02.06 are used to define the main set frequency
and P02.07~P02.09 are used to define the auxiliary frequency. The Fig. 6-5 shows the process of
adjusting the proportion of the main set frequency and the auxiliary set frequency to form the set
frequency.
Main reference freq.
P02.04
1
Auxiliary reference freq.
P02.07
Calculation of
reference freq. source
P02.10
2
3
4
2
2 P02.09* 2 (P02.07>3)
2 = 2 (P02.07<=3)
Proportion adjustment
(P02.11, P02.12)
Reference
frequency
Fig.6-5 Diagram for combining the set frequency
0: Motor 1
1: Motor 2
The parameters of motor 1 and motor 2 correspond to the function codes of Group P03. Corresponding
parameters will be displayed based on the motor selected
.
MV200 has four types of running command channels as below:
Torque reference
-300.0~300.0%
0.0%
P01.32
Pulse frequency of terminal X6
0.0
100.0
Hz
0.0
P01.42
Reserved 0P02.00
Running command channel selection
0~3
0
P02.02
Motor selection
0~1
0
P02.01
Reserved 0
P01.33~P01.41
Reserved 0
P01.30~P01.31
Estimated temperature of moto
0~200℃
0
P01.29
Process closed loop output
-100.0~100.0%
0.0%
P01.28
 Loading...
Loading...