5Functions set with parameters
Movement parameter 5-443
Align type selection ALIGNTYP Integer 1 Specifies how to find the hand posture used for the hand align-
ment movement and the Align function. The robot performs the
hand alignment movement toward its hand posture. The Align
function returns the XYZ coordinate values set for the hand
alignment.
0: Normal
For each of the A, B, and C components of the XYZ coordi-
nate posture, find the closest XYZ postures (0 degree, +/-90
degrees, and +/-180 degrees).
Specify this method for the RV-type robot.
1: Cylindrical
Find the position whose posture axis (C) is changed along
the straight line connecting the origin ((x, y)=(0, 0)) and the
control point.
When the workpiece is arranged cylindrically for the RH-type
robot, this method may be useful.
Do not specify this method for the RV-type robot.
2 or later: Reserved
0
Origin setting com-
pletion status
MEINST Integer 1 Indicates the origin setting completion status.
By setting the origin, this parameter is automatically set.
0
Pulse number for
the origin setting
MEINSZ Integer 8 Sets the number of pulses at 0 position for the origin setting.
By setting the origin, this parameter is automatically set.
0,0,0,0,0,0,0,0
Pulse position
within one revolu-
tion for the origin
setting
MEOFFZ Integer 8 Sets the pulse position within one revolution at 0 position for the
origin setting.
By setting the origin, this parameter is automatically set.
0,0,0,0,0,0,0,0
Check data for the
origin setting
MEINSD Integer 1 Sets the check data for MEISZ.
By setting the origin, this parameter is automatically set.
0
Mechanical stopper
origin
MORG Real value 8 Designate the mechanical stopper origin.
(J1,J2,J3,J4,J5,J6,J7,J8) Unit:deg
It varies with models.
User-designated
origin
USERORG Real value 8 Designate the user-designated origin position. This normally
does not need to be set.
(J1,J2,J3,J4,J5,J6,J7,J8) Unit:deg
It varies with models.
Select the function
of singular point
adjacent alarm
Refer to "5.17About
the singular point
adjacent alarm"
MESNGLSW
Integer 1 Designate the valid/invalid of the singular point adjacent alarm.
(Invalid/Valid=0/1)
When this parameter is set up "VALID", this warning sound is
buzzing even if parameter: BZR (buzzer ON/OFF) is set up
"OFF".
1(Valid)
Jog setting JOGJSP Real value 3 Designate the joint jog and step operation speed.
(Inching H, inching L, maximum override.)
Inching H: Feed amount when jog speed is set to High Unit: deg.
Inching L: Feed amount when jog speed is set to Low Unit: deg.
Maximum override: Operates at OP override x maximum over-
ride.
Setting value for
each mechanism
JOGPSP Real value 3 Designate the XYZ jog and step operation speed.
(Inching H, inching L, maximum override.)
Inching H: Feed amount when jog speed is set to High
Unit: deg.
Inching L: Feed amount when jog speed is set to Low
Unit: deg.
Maximum override: Operates at OP override x maximum over-
ride.
Operation exceeding the maximum speed 250 mm/s cannot be
performed.
Setting value for
each mechanism
Jog speed limit
value
JOGSPMX Real value 1 Limit the robot movement speed during the teach mode.
Unit: mm/s
Even if a value larger than 250 is set, the maximum value will be
limited to 250.
250.0
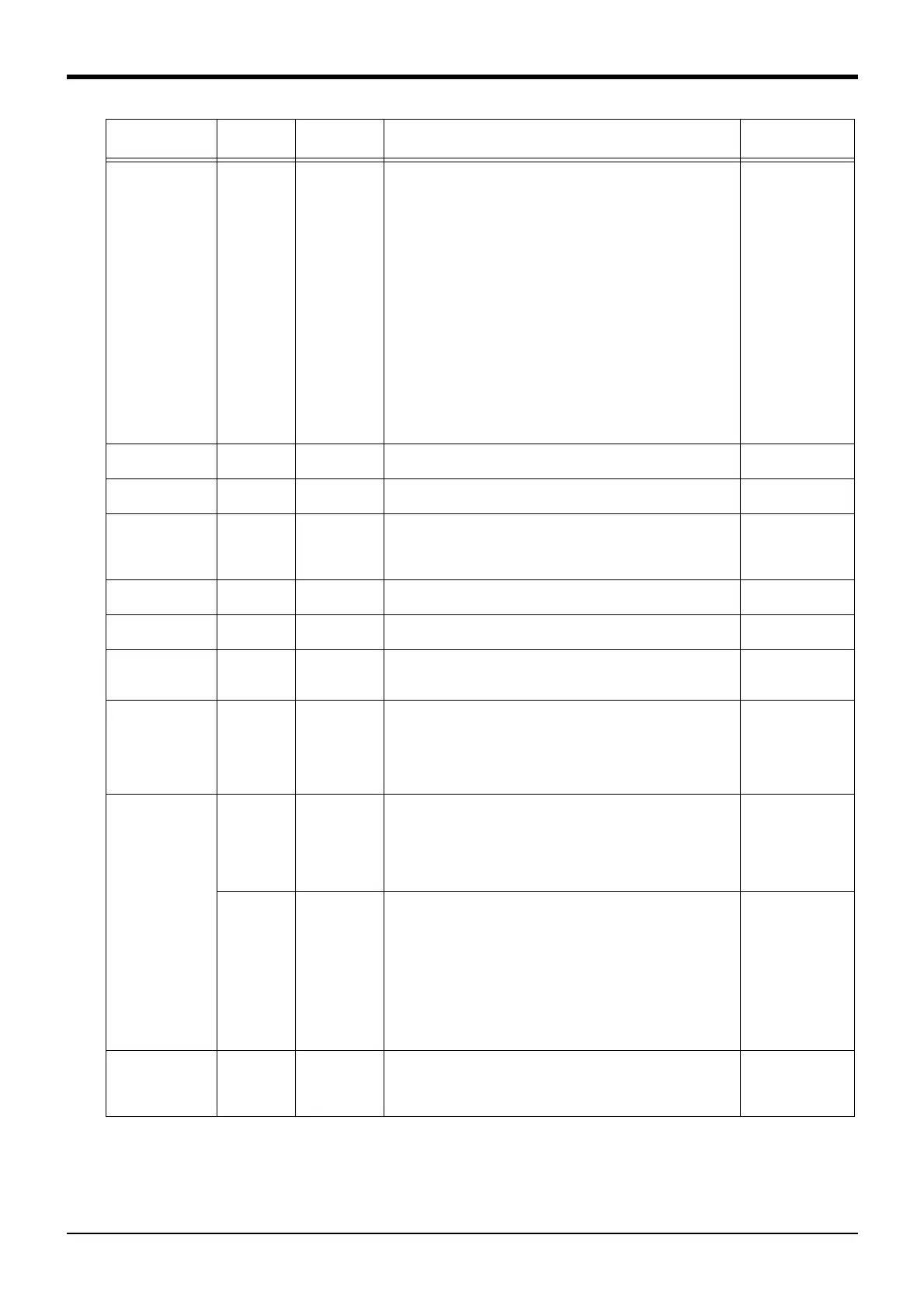
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation Factory setting
 Loading...
Loading...




