6-534 Interference avoidance function
5Functions set with parameters
5.24.4 Registering a free plane limit
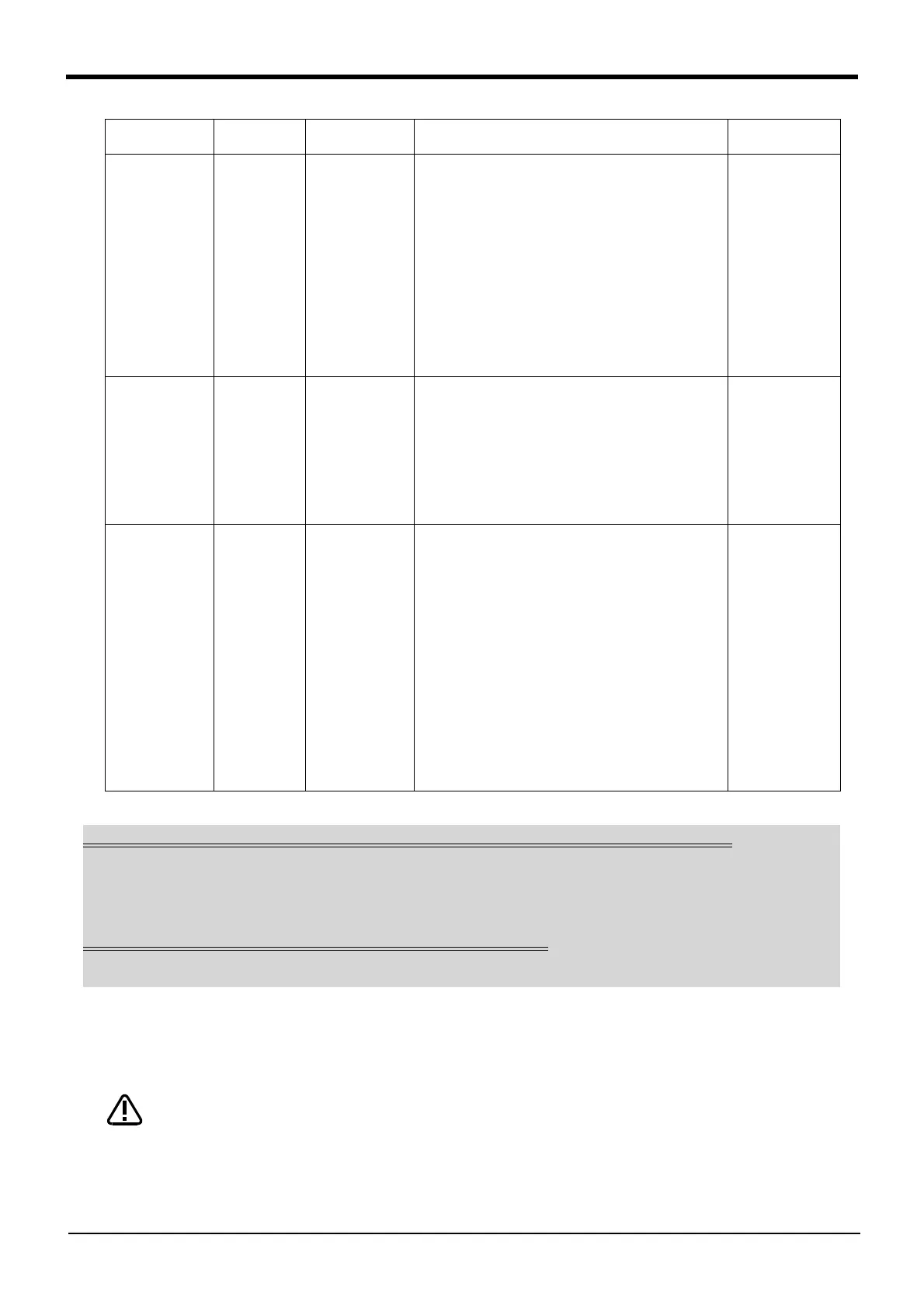
Register a free plane limit used for checking for interference. The required registration details are shown in
Table 5-37. Maximum of eight planes can be used for checking for interference.
An interference check is executed only by registered CPU.
Center position of
simulated compo-
nent
(workpiece)
CAVPSW1 to 8 Real number 6 For each simulated component, designate the center
position and pose of the simulated component from the
origin point of the Mechanical interface coordinate
system. (Each simulated component corresponds to the
last digit (1 to 8) of the parameter name.)
1st element: Distance in X axis direction (mm)
2nd element: Distance in Y axis direction (mm)
3rd element: Distance in Z axis direction (mm)
4th element: angle of rotation on X axis (degree)
5th element: angle of rotation on Y axis (degree)
6th element: angle of rotation on Z axis (degree)
Note) Calculate the rotation angle in order of Z → Y → X
axis. If shape is the sphere, setting of the rotation
angle is unnecessary.
Set all parameters
(CAVPSW1 to 8) to
“0, 0, 0, 0, 0, 0”.
Simulated compo-
nent size
(workpiece)
CAVSZW1 to 8 Real number 4 Set the size of each simulated component.
(Each simulated component corresponds to the last digit
(1 to 8) of the parameter name.)
1st element: Radius (mm)
2nd element: Length (mm)
3rd element: Fixed to 0
4th element: Fixed to 0
Note) If shape is the sphere, setting of the length is
unnecessary.
Set all parameters
(CAVSZW1 to 8) to
“0, 0, 0, 0”.
Simulated compo-
nent enable/dis-
able
(workpiece)
CAVSCW1 to 8 Integer 3 Set whether to check (enable or disable) interference for
each simulated component.
(Each simulated component corresponds to the last digit
(1 to 8) of the parameter name.)
1st element: Enable/disable setting
(0: Disable, 1: Enable)
2nd element: Set whether to let the interference
avoidance function to temporarily disable
interference checks during jog operation.
(Refer to Temporarily canceling the
interference avoidance function.)
(0: Disable, 1: Maintain enabled state)
Note) If interference is inevitable during
jog operation for teaching, setting
the simulated hand or workpiece to
“0: Disable” can be convenient.
3rd element: Fixed to 0
Set all parameters
(CAVSCW1 to 8)
to “0, 0, 0”.
Parameter
Parameter
name
No. of arrays
No. of characters
Details explanation Factory setting
Changing the simulated component to be checked at program execution (hand, workpiece)
When a program is executed, the simulated hand and workpiece targeted for the interference check
with the Loadset (Load Set) command can be changed so that the interference is checked according to
the hand type actually being used or the workpiece type actually being grasped.
TheLoadset (Load Set) command designates a hand number or workpiece number, which is set with
parameter beforehand.
Executing interference check only when workpiece is grasped
Interference checks are performed for a simulated workpiece only while the workpiece is grasped with
the parameter HNDHOLD*. (Interlinked with hand open/close)
 Loading...
Loading...




