5Functions set with parameters
Interference avoidance function 6-525
5.24.2 Preparing and connecting the devices
The devices required to use this function are shown in Table 5-28, and an example of the connection is
given in Fig. 5-14.
Refer to the figure and connect the required devices.
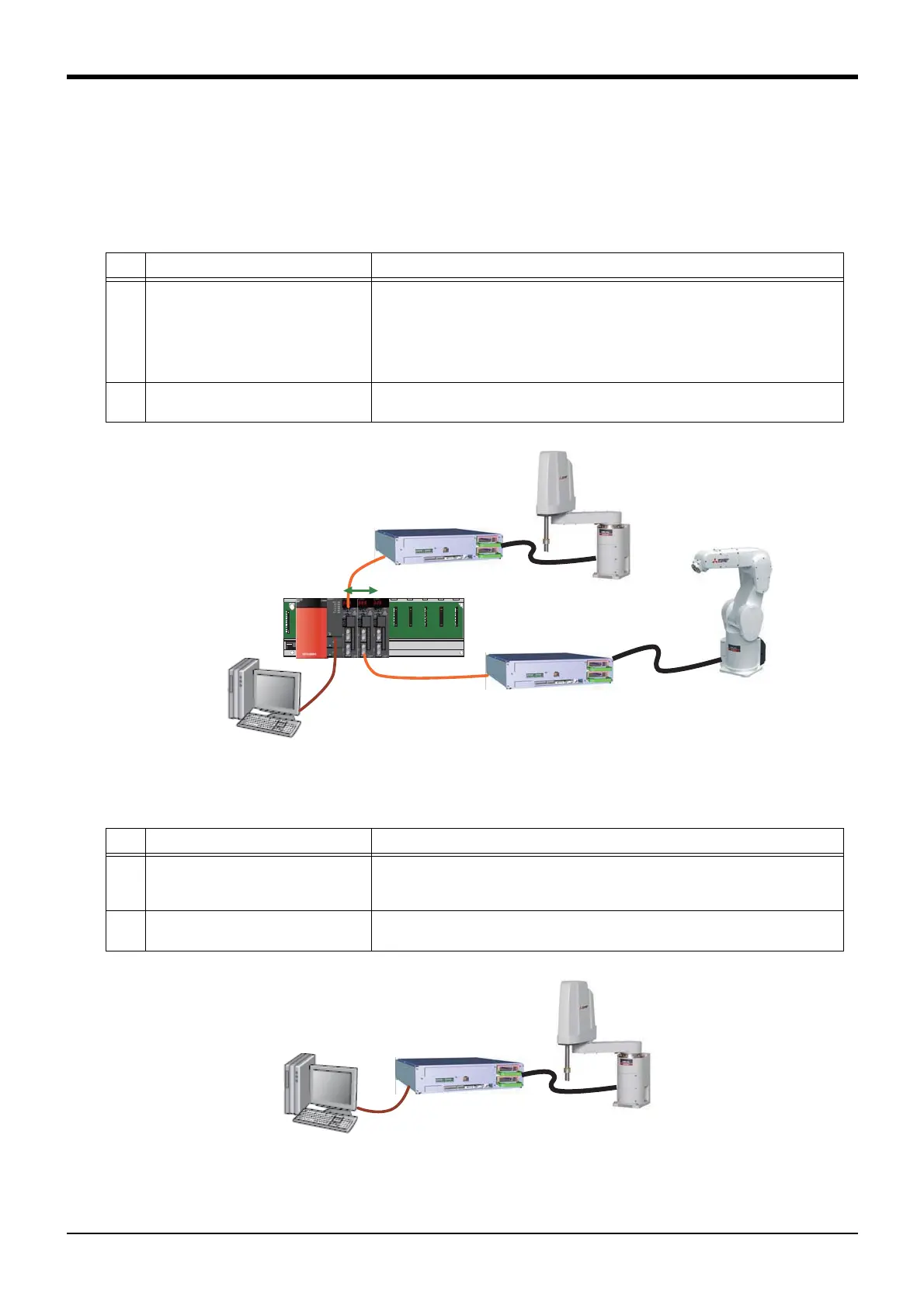
(1) Checking for interference between robots (Only for CR750-Q/CR751-Q controller)
Table 5-28:Required devices
Fig.5-14:Connecting the devices
(2) Checking for interference between robot and free plane limit
Table 5-29:Required devices
Fig.5-15:Connecting the devices (CR750-D/CR751-D controller)
No. Device Remarks
1 Up to two or three robots
(CR750-Q/CR751-Q controller)
This function uses direct communication between robot CPUs via the iQPlatform’s
shared memory.
Robot controller software version:
Ver. R3 or later (shape of a simulated component: a sphere)
Ver. R3m or later (shape of a simulated component: a sphere, a cylinder)
Note) You should use by the same S/W versions.
2 Personal computer equipped with RT
ToolBox2
Connects the robot CPUs.
RT ToolBox2 software version: Ver. 2.1L or later
No. Device Remarks
1 One robot Checking for interference with only free plane limit of own robot.
Robot controller software version:
Ver. R6b/S6b or later
2 Personal computer equipped with RT
ToolBox2
Connects the robot CPUs.
RT ToolBox2 software version: Ver. 3.40G or later
Robot CPUs communicate via
iQ shared memory
Personal computer
(RT-ToolBox2)
Connected to robot
CPU with USB, etc.
Drive unit
Drive unit
Robot arm
Robot arm
Note) This figure shows an example of connecting two robots.
Personal computer
(RT-ToolBox2)
Connected to robot
CPU with USB, etc.
Drive unit
Robot arm
<CR750-D/CR751-D controller>
 Loading...
Loading...




