7Appendix
Spline interpolation Appendix-611
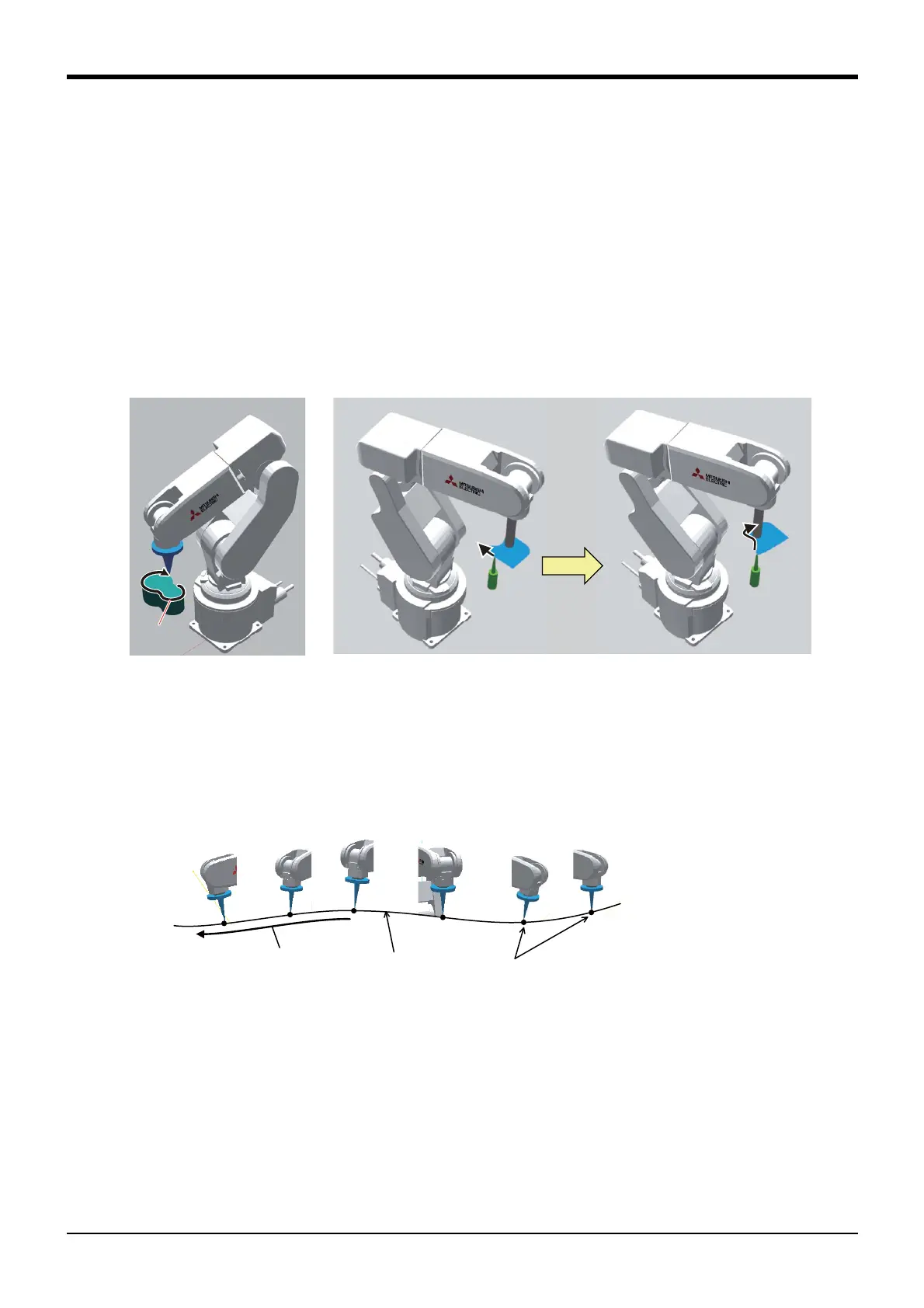
7.3 Spline interpolation
Spline interpolation, one of the robot movement commands, is explained in this section.
7.3.1 Outline
(1) Outline
Spline interpolation is a function that moves the robot at the designated speed along a spline curve that
smoothly connects designated path points.
Ex-T spline interpolation is a function used to move the spline curve that smoothly links path points specified
on the workpiece grasped by the robot along an arbitrary coordinate system origin (Ex-T coordinate system
origin) at a specified speed (Ex-T coordinate system origin viewed from workpiece moves relatively at spec-
ified speed).
The robot can be moved along a curved path that was not possible with conventional linear or circular inter-
polation. This interpolation can be used for sealing, polishing and chamfering processes, etc.
Fig.7-5: Outline of spline interpolation
(2) Features
• A smooth spline curve is generated between each path point so that the robot positions and posture desig-
nated as path points are passed. The robot moves along that curve at the speed designated with linear
speed.
Fig.7-6:Spline interpolation
Spline inter-
polation
(a) Spline interpolation (b) Ex-T spline interpolation
Moves at desig-
nated linear speed
Spline curve
Path points
 Loading...
Loading...




